从零开始EDA环境搭建
Ubuntu18.04 系统安装
http://mirrors.aliyun.com/ubuntu-releases/18.04/
阿里云镜像下载
VMware配置安装后,启动后为英文。
在更改语言前,先换源。

换源
https://zhuanlan.zhihu.com/p/61228593
桌面右键打开terminal
首先备份源列表
sudo cp /etc/apt/sources.list /etc/apt/sources.list_backup
打开sources.list文件
sudo gedit /etc/apt/sources.list
阿里源
deb http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
刷新列表
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install build-essential
换源以后就可以去下载语言了。
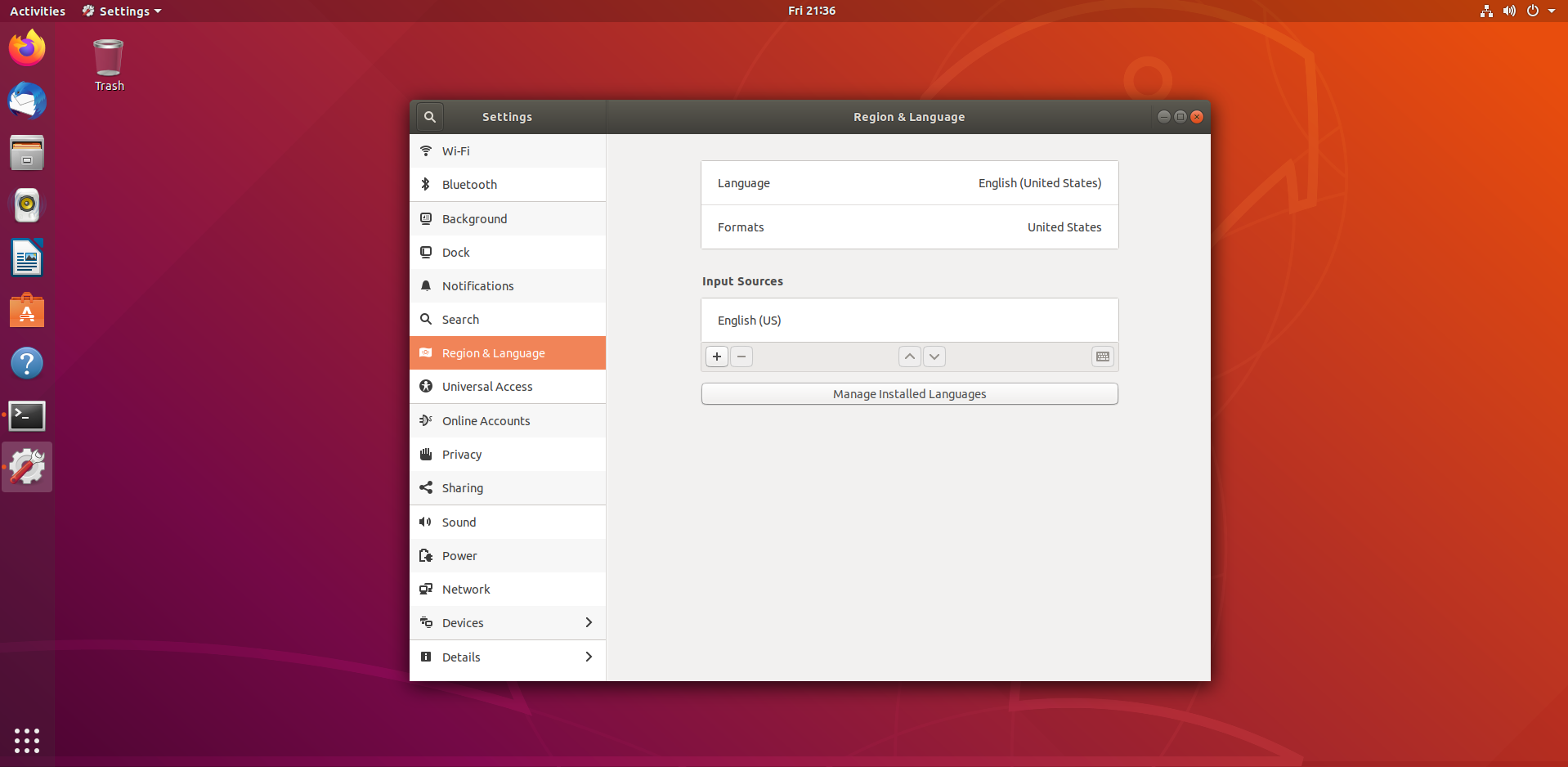
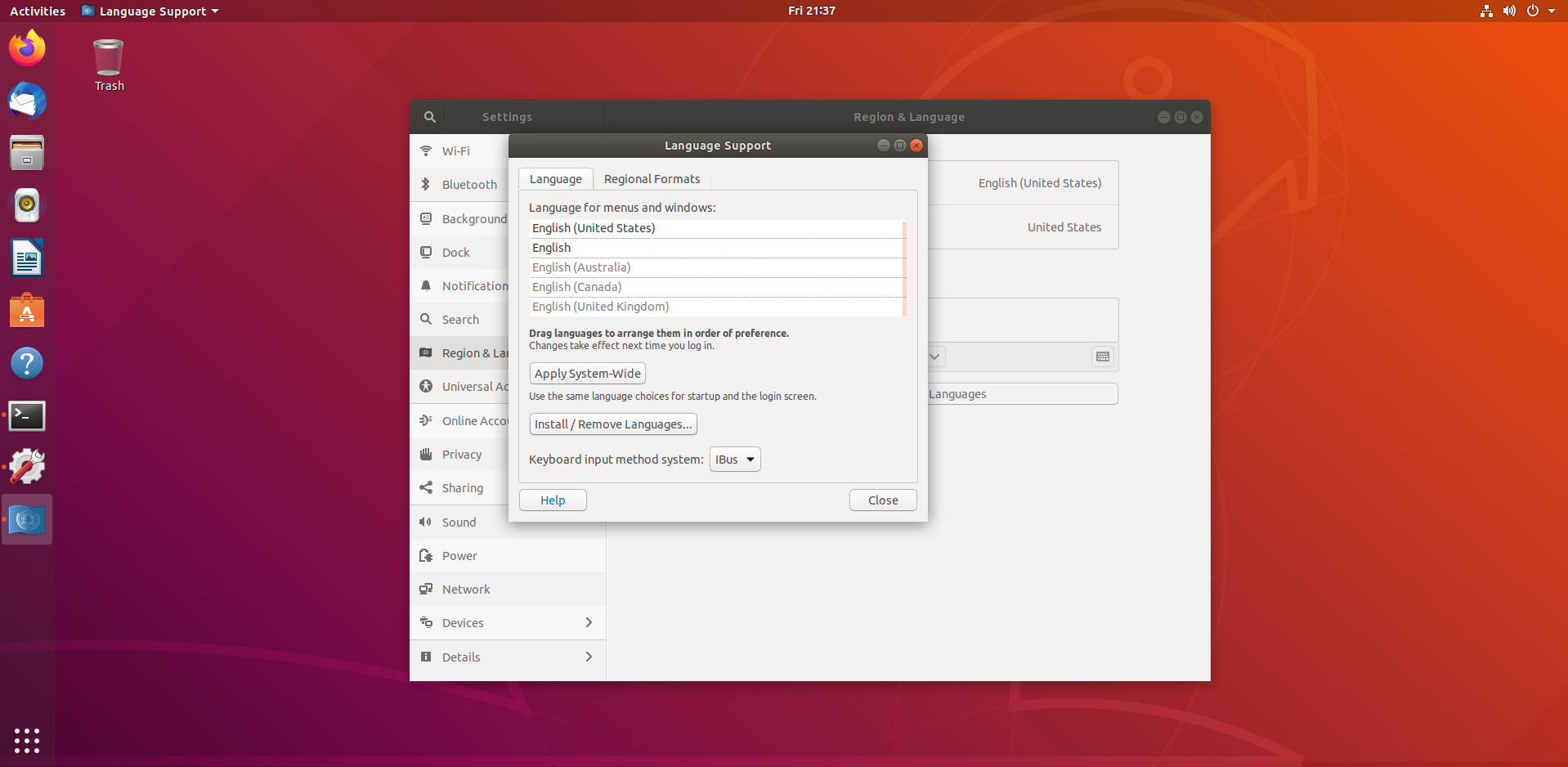
选择下载语言,找到Chinese
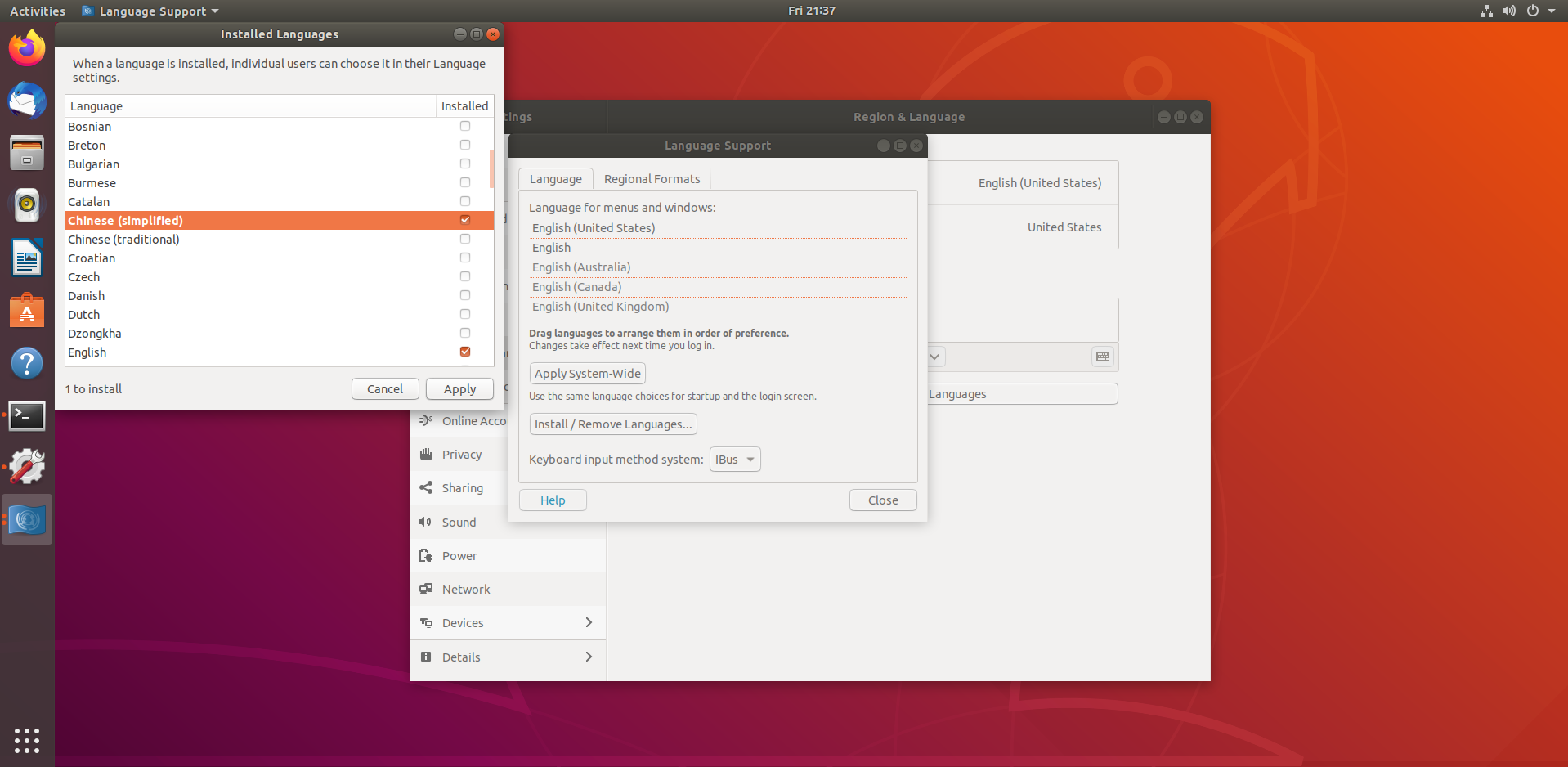

更改以后重启。
重启以后提示更改文件夹名称,最好不做修改保持英文。
系统不自带python2,补充安装
sudo apt install python
系统自带python3.6.9,应该够用,就不装先了。

下面开始准备gvim
gvim基本安装
系统自带的vi会出现乱码问题,先卸载
sudo apt-get remove vim-common
重新安装,直接装vim-gtk3
sudo apt install vim-gtk3
基本可以使用了,接下来开始搞插件。
安装git
sudo apt install git
接着首先安装vundle插件管理器
参考https://www.cnblogs.com/feiyuhuo/p/10274236.html
1、先新建目录
mkdir ~/.vim/bundle/Vundle.vim
2、git 克隆 Vundle 工程到本地
git clone https://github.com/gmarik/Vundle.vim.git ~/.vim/bundle/Vundle.vim
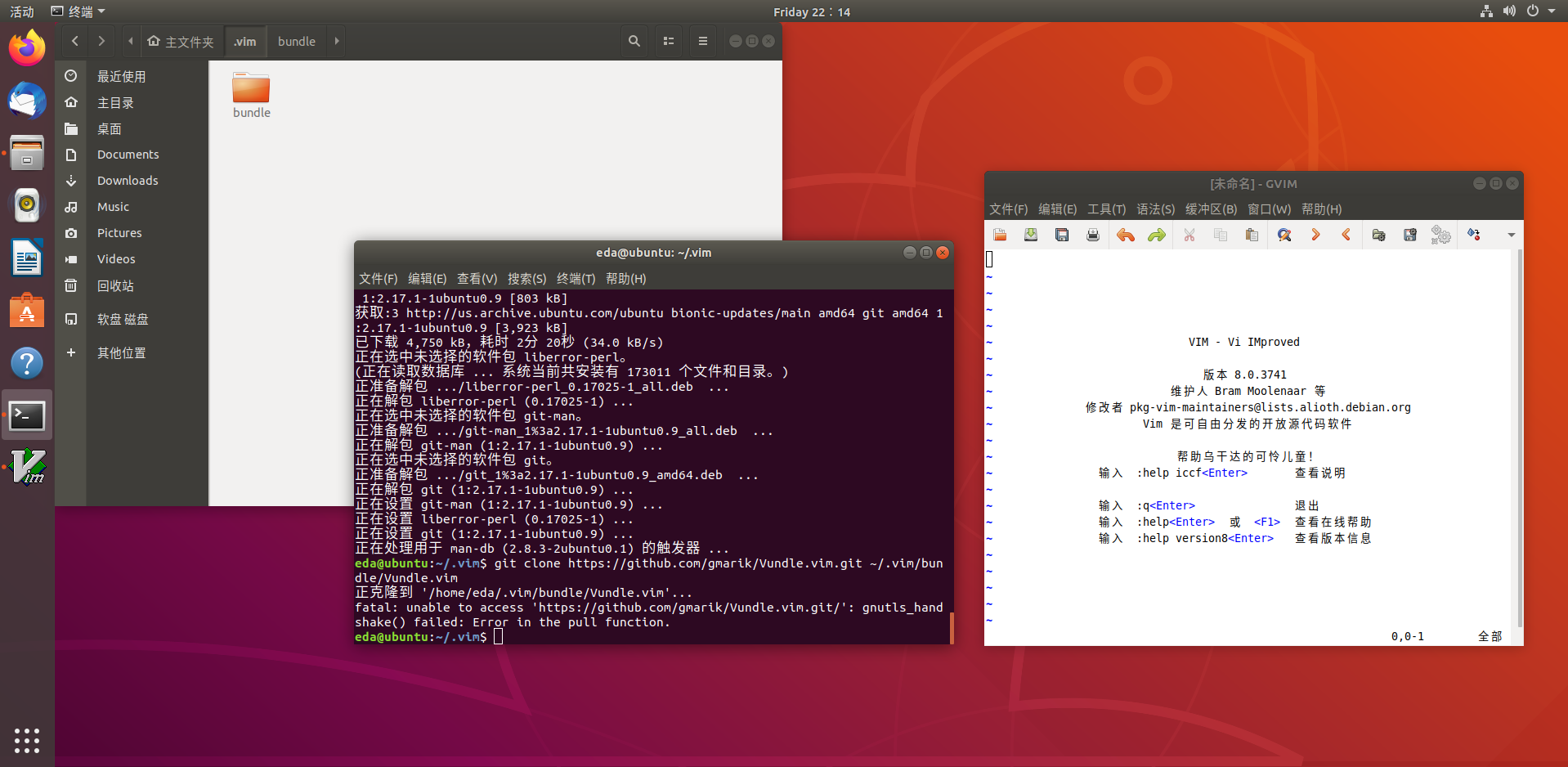
出现这个无法访问的提示……
那只能将https修改为git
已经准备好的.vimrc文件整个复制进去。【此时目录下应该没有,自己新建一个并命名为.vimrc,然后把下面的内容复制进去即可】
启动gvim,此时会报错无所谓,因为插件还没安装。
回车两下进入正常显示后,输入冒号:PluginInstall安装插件
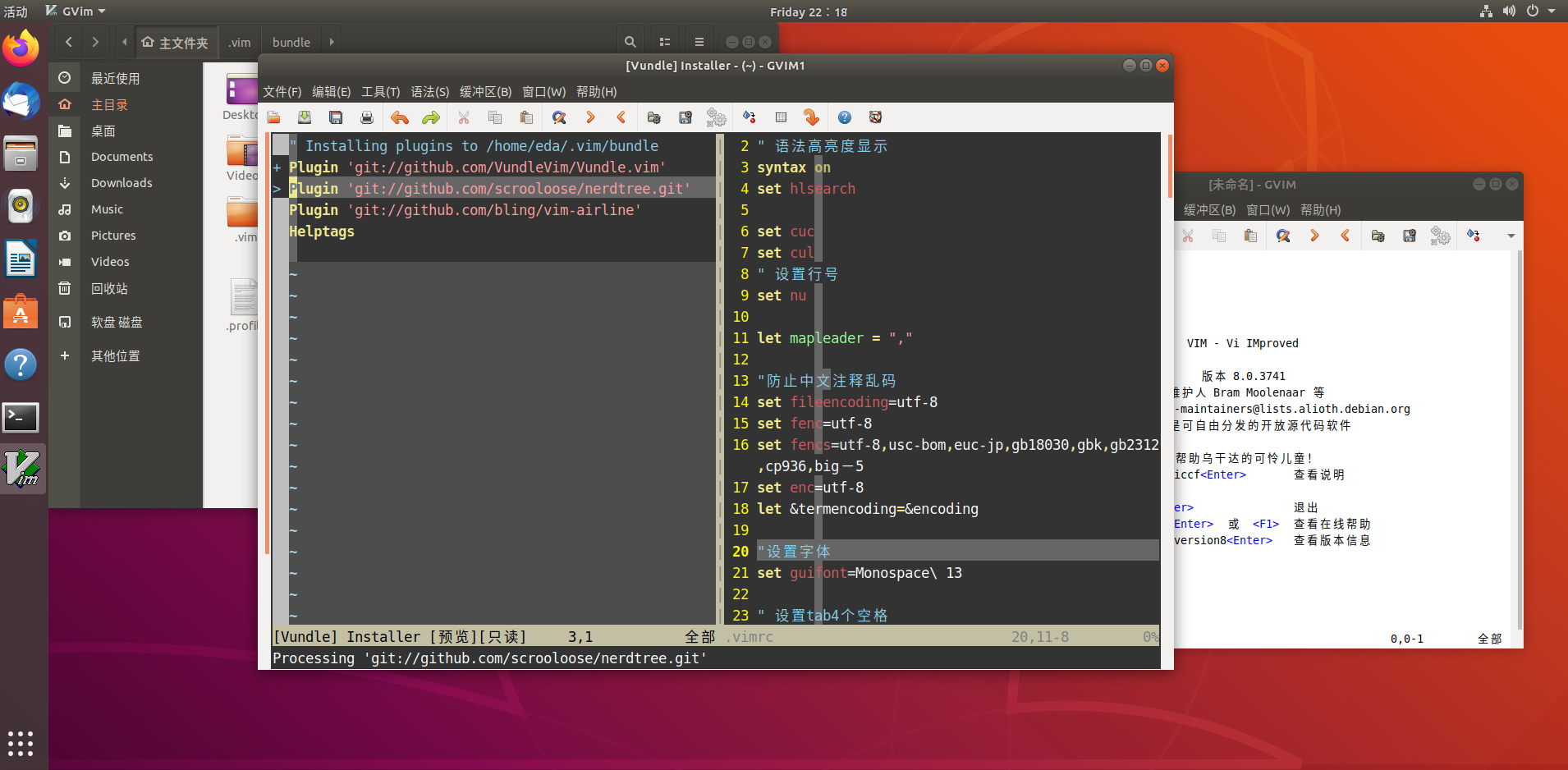
暂时是只安装三个插件。其他先注释掉了,以后再装。
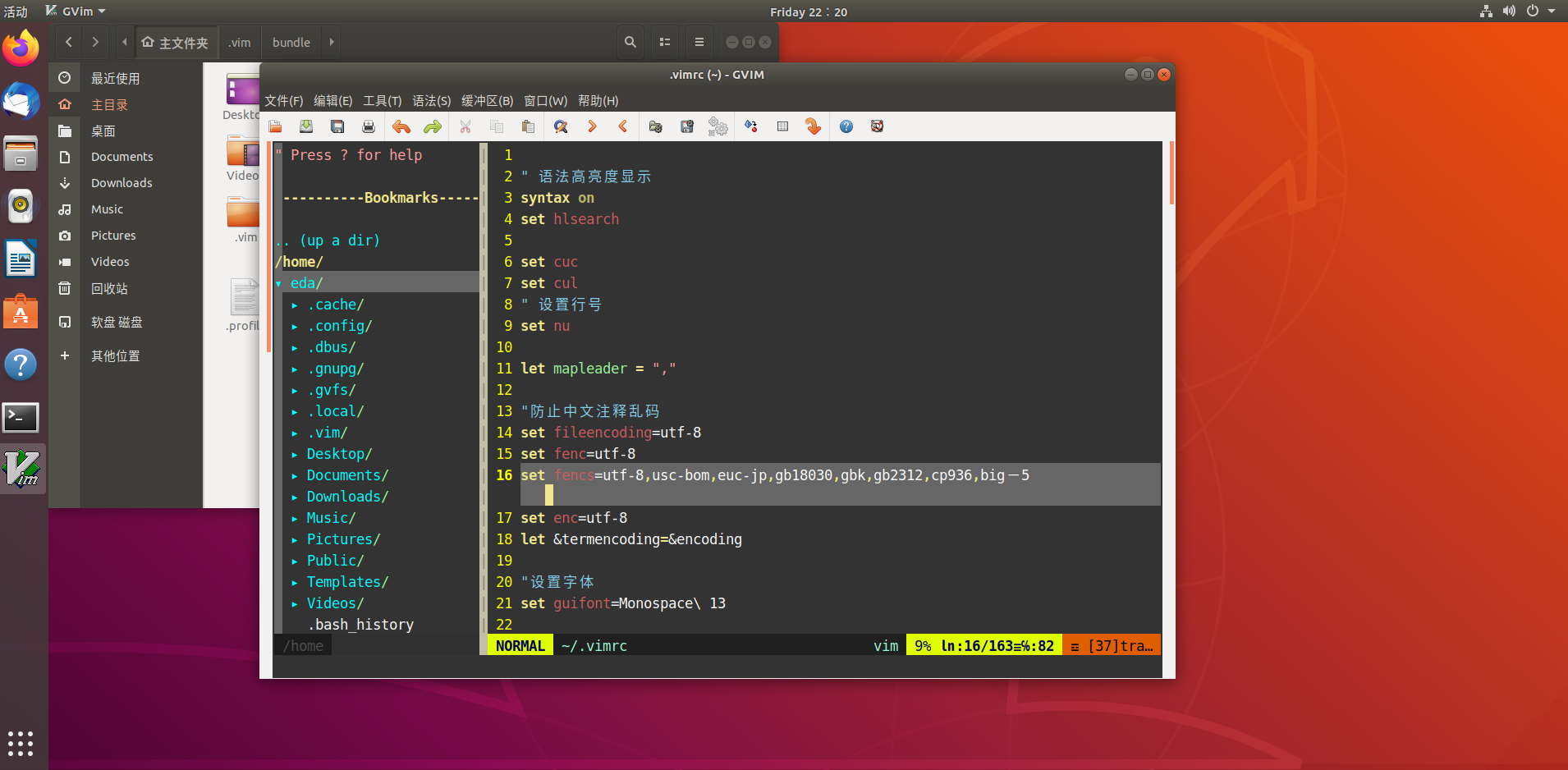
完成以后重启gvim现在已经是比较好看的了。
 在~/.vim目录内,新建colors和syntax文件夹
在~/.vim目录内,新建colors和syntax文件夹
语法文件和色彩方案搭配效果如下
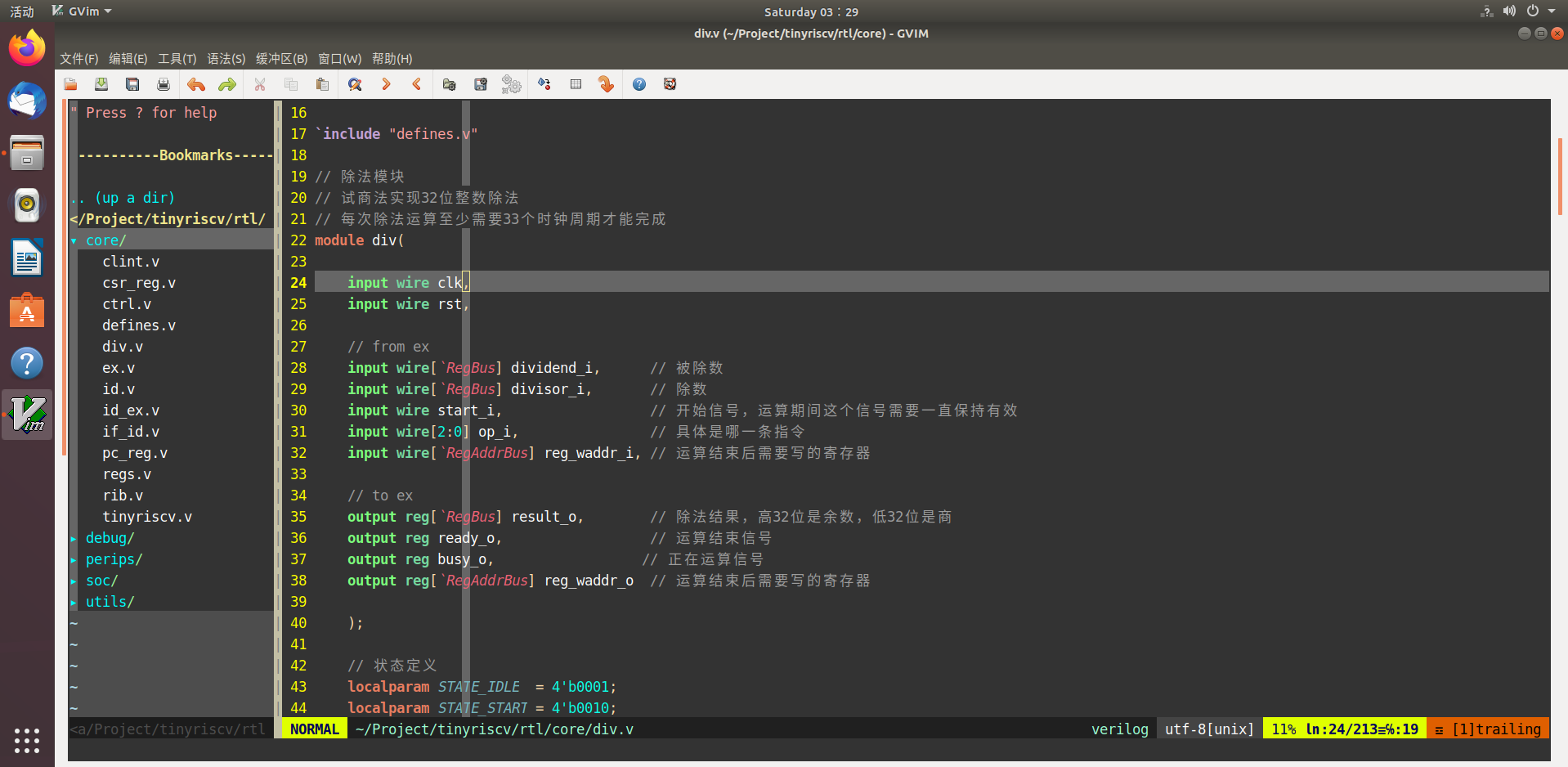
看verilog代码才会有效果。
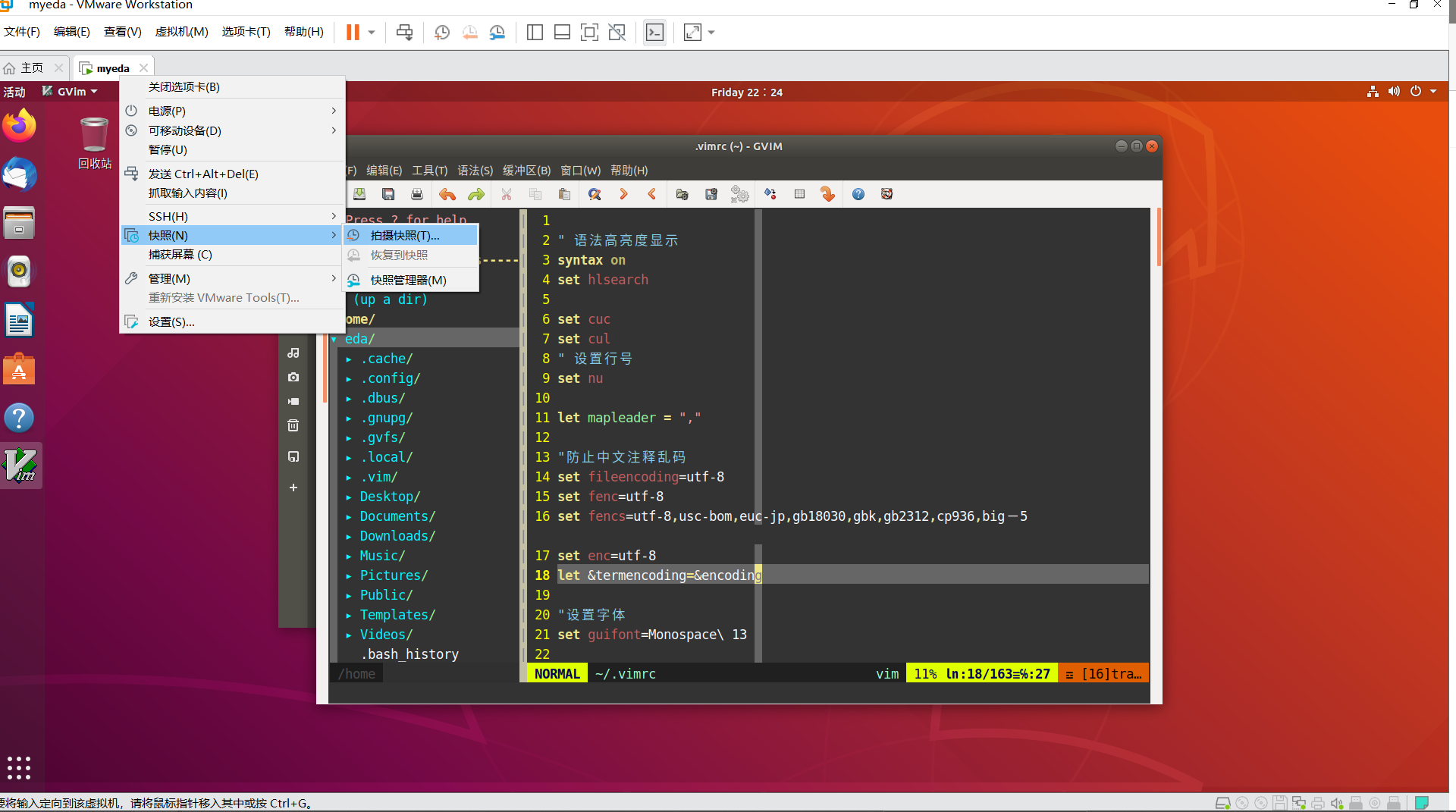
那么至此最基本的准备就完成了。
先拍摄一个快照保存一下
tinyriscv环境搭建
那么目前是没有多余配置的,
接下来先把tinyriscv的环境准备好。
作者的gitee库
https://gitee.com/liangkangnan/tinyriscv/
在Downloads文件夹下下载iverilog
git clone https://github.com/steveicarus/iverilog.git
cd iverilog
切换到v11分支(必须用V11或以上的版本)
git checkout v11-branch
安装依赖
sudo apt-get install autoconf gperf flex bison build-essential
编译、安装iverilog和vvp
sh autoconf.sh
./configure
sudo make&make install
然后准备python3软链接
先删除原来的软链接,这个是连到python2的
sudo rm /usr/bin/python
然后建立新的软链接
sudo ln -s /usr/bin/python3.6 /usr/bin/python
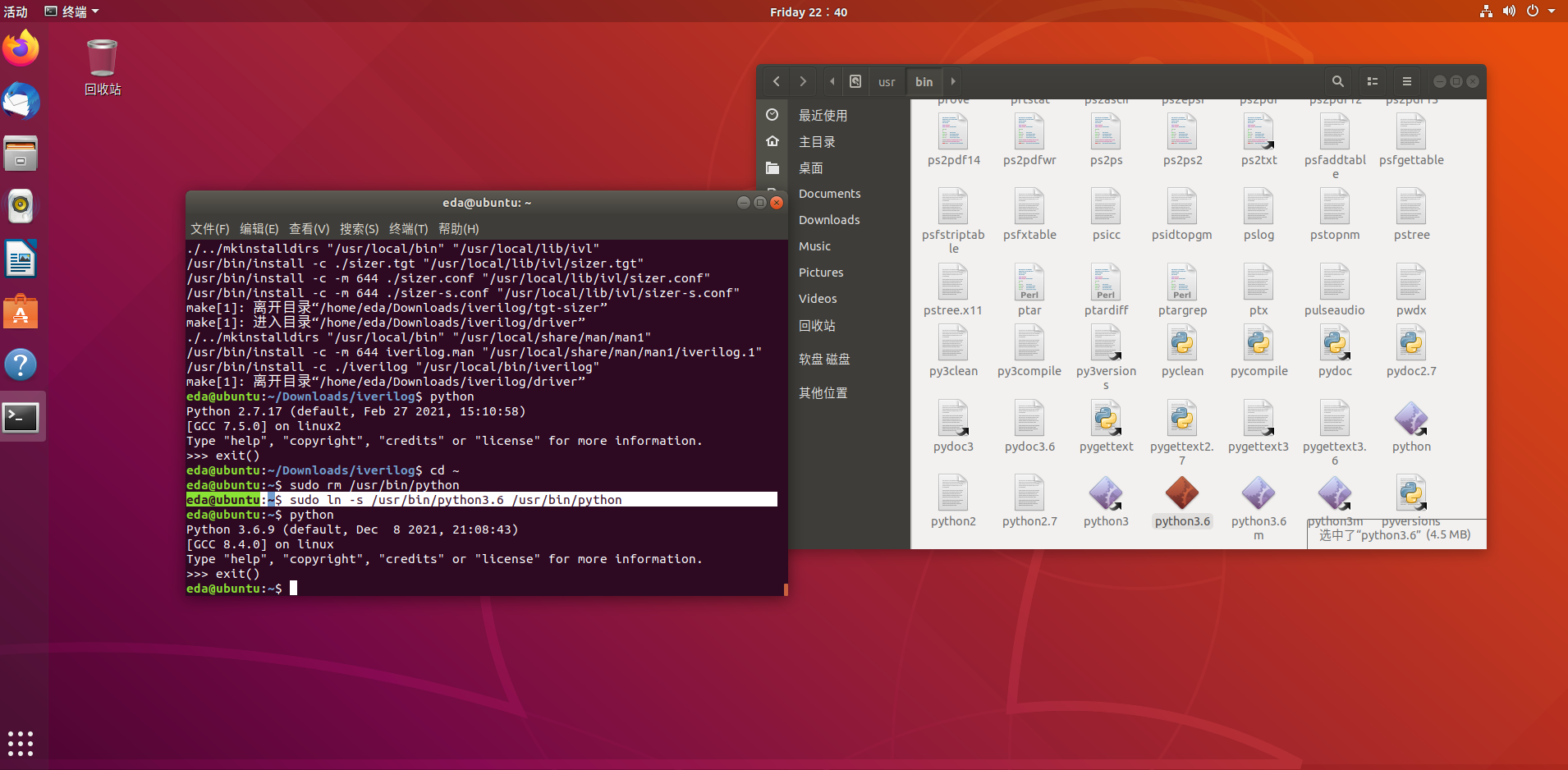
那么现在直接如数python会看到打开的是3.6.9了。exit()退出,接着搞别的。
安装gtkwave
sudo apt-get install gtkwave
下载gun工具链,百度网盘下载(链接:https://pan.baidu.com/s/10uLZYf_cgtH94kZI_N6JhQ 提取码:uk0w)
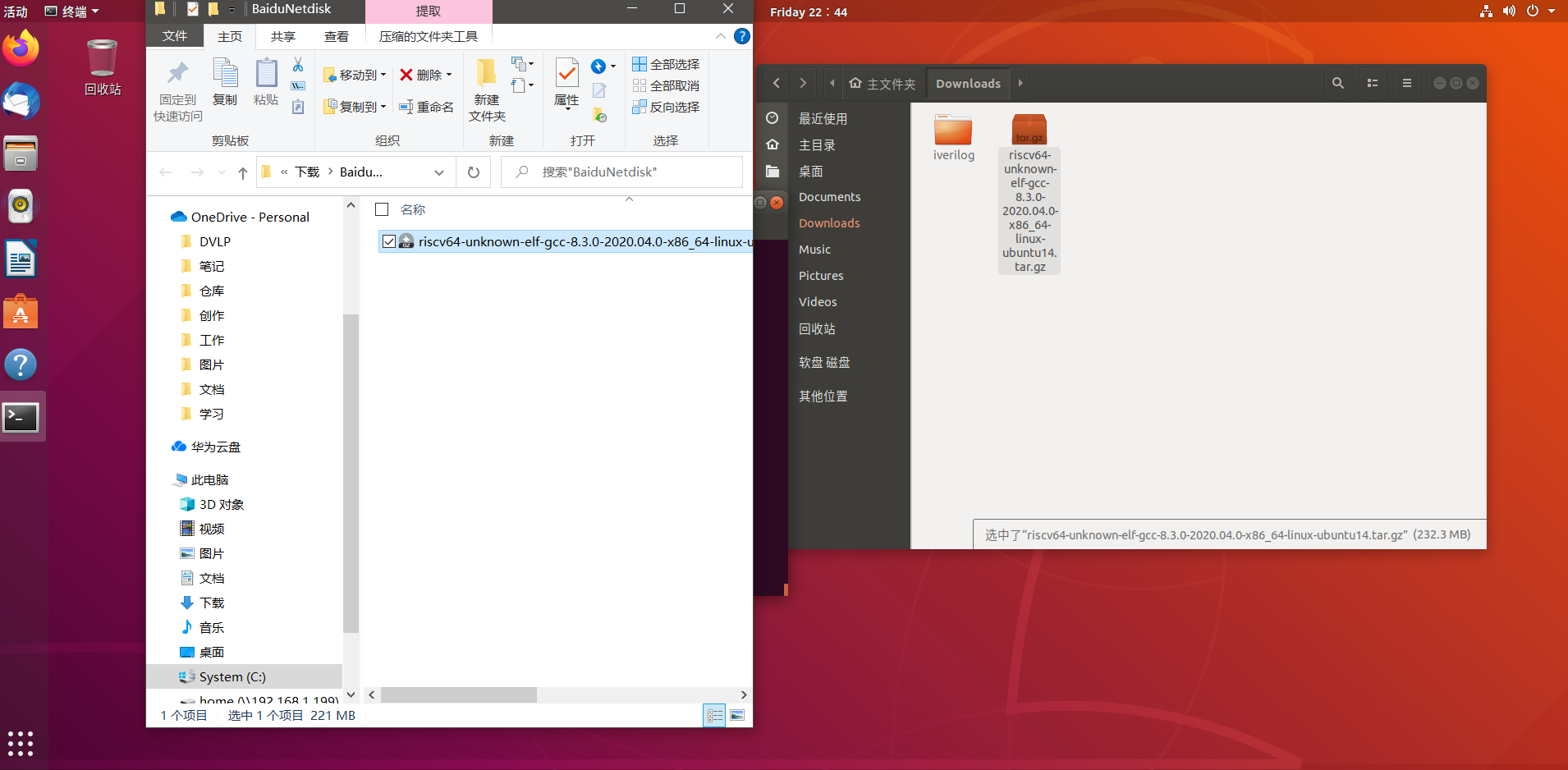
然后直接拖拽进去。
右键可以直接解压
接着克隆tinyriscv项目工程
在Downloads目录下克隆
git clone https://gitee.com/liangkangnan/tinyriscv.git
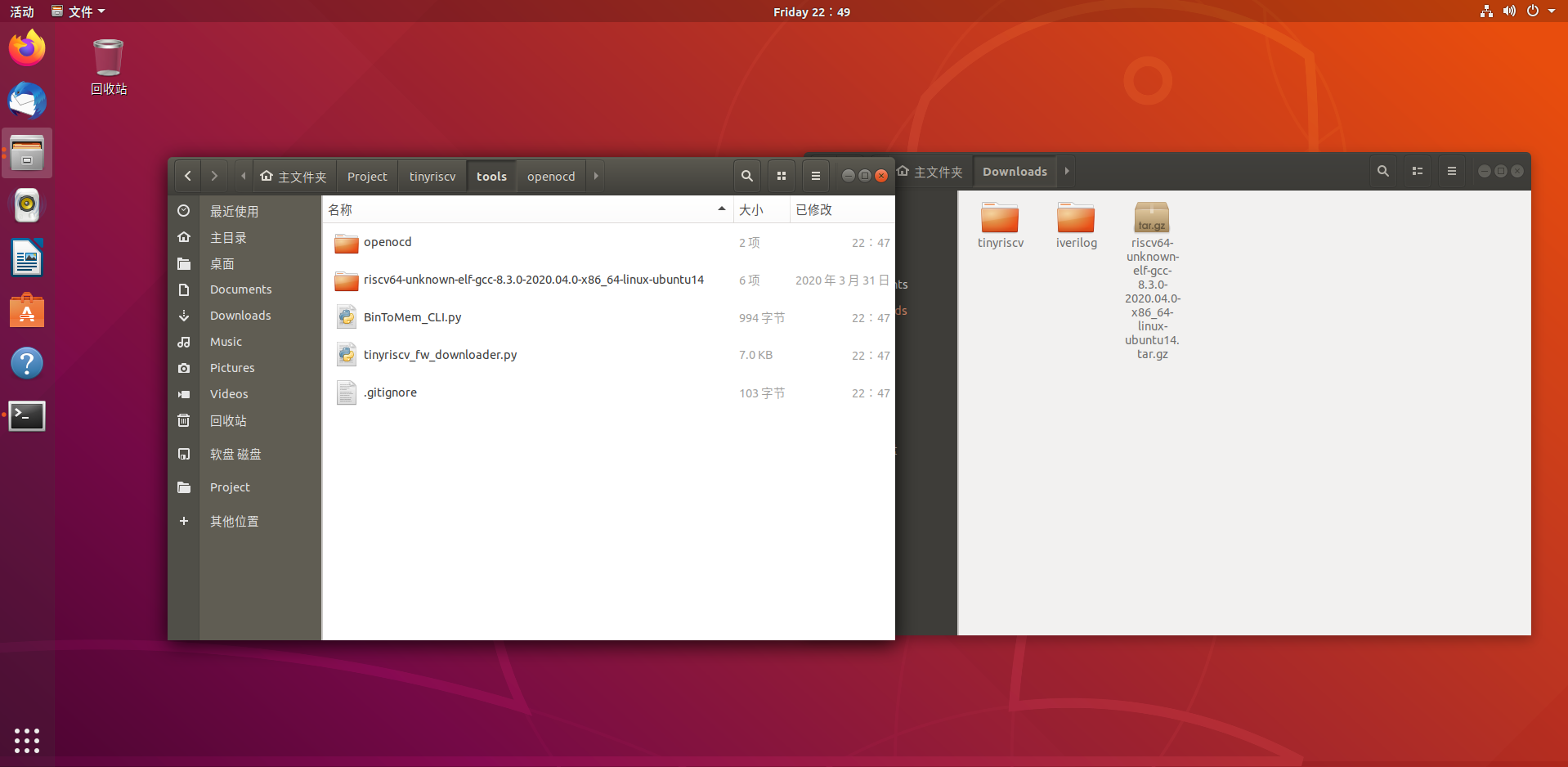
主目录下新建个Project文件夹,将刚克隆的复制过来,之前的作为原始备份。
之前下载的工具链复制到tinyriscv工程下的tools目录中
修改tinyriscv/tests/example目录下的common.mk文件
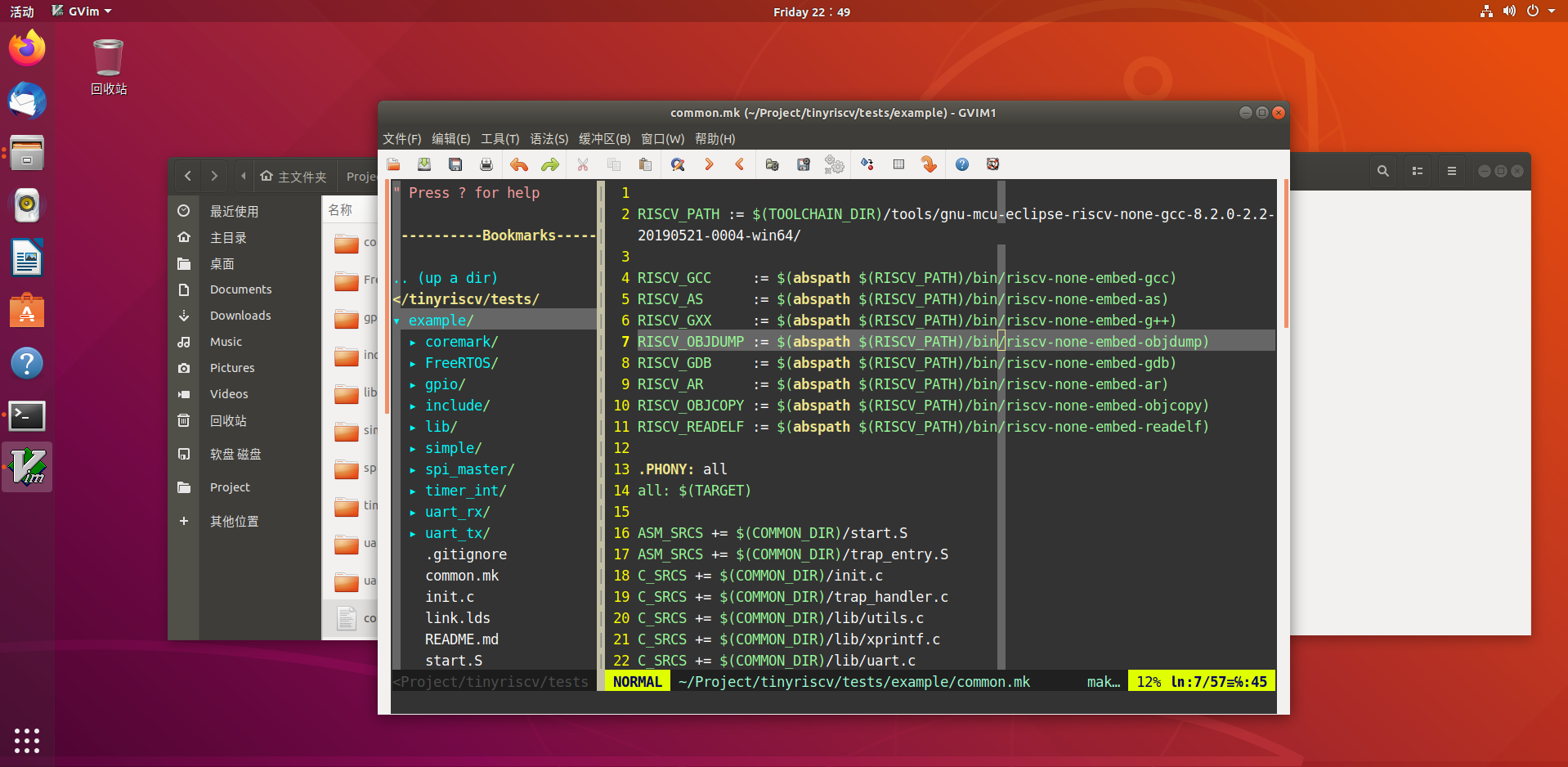
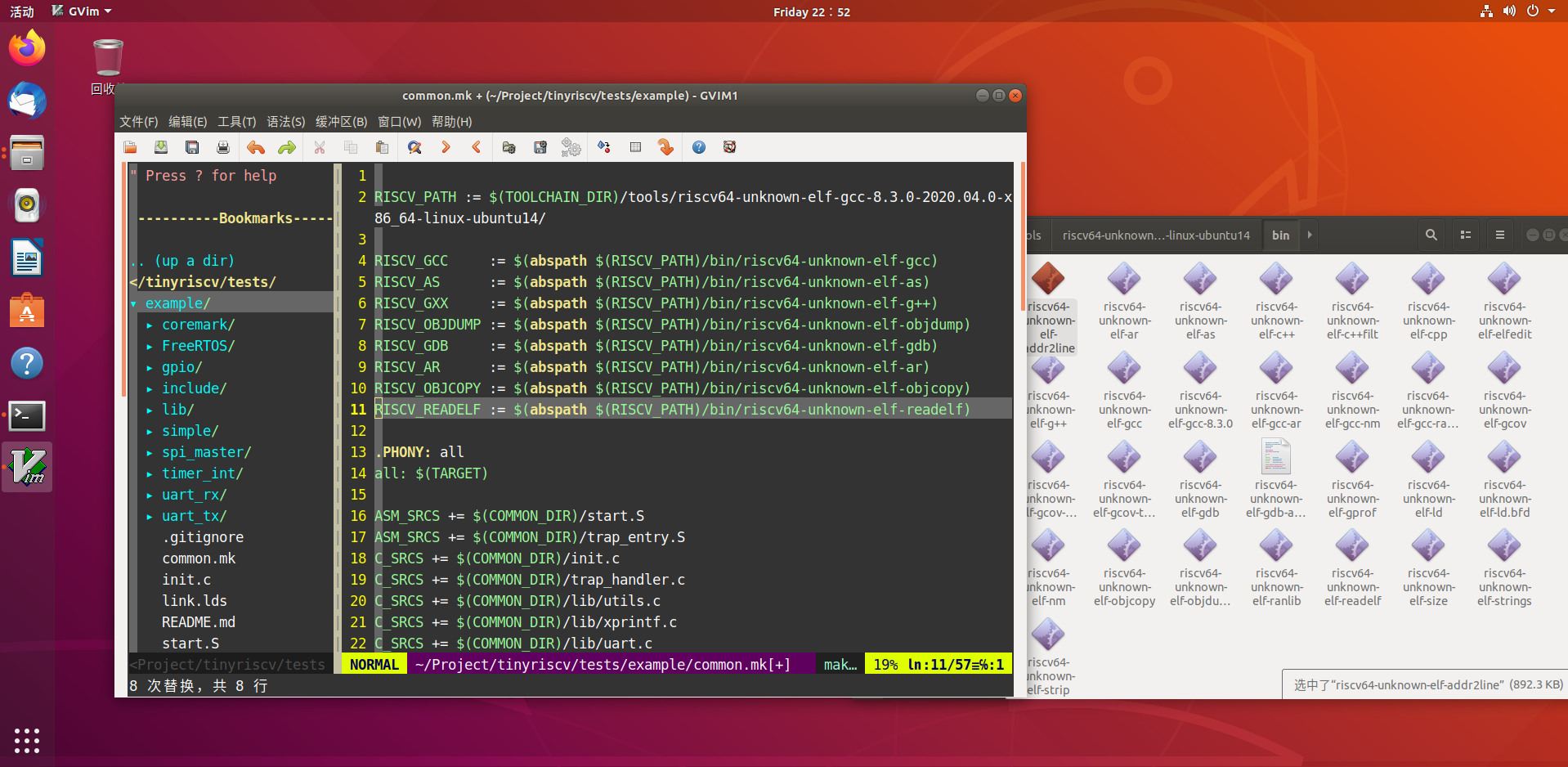
把名称修改过来,保持和工具链名称前缀一致。
:wq保存并退出
下面开始进行测试
sim目录下启用终端
1 | |
指令执行会报错,说没有这个文件或目录。
把右下划线全部替换为左下划
1 | |
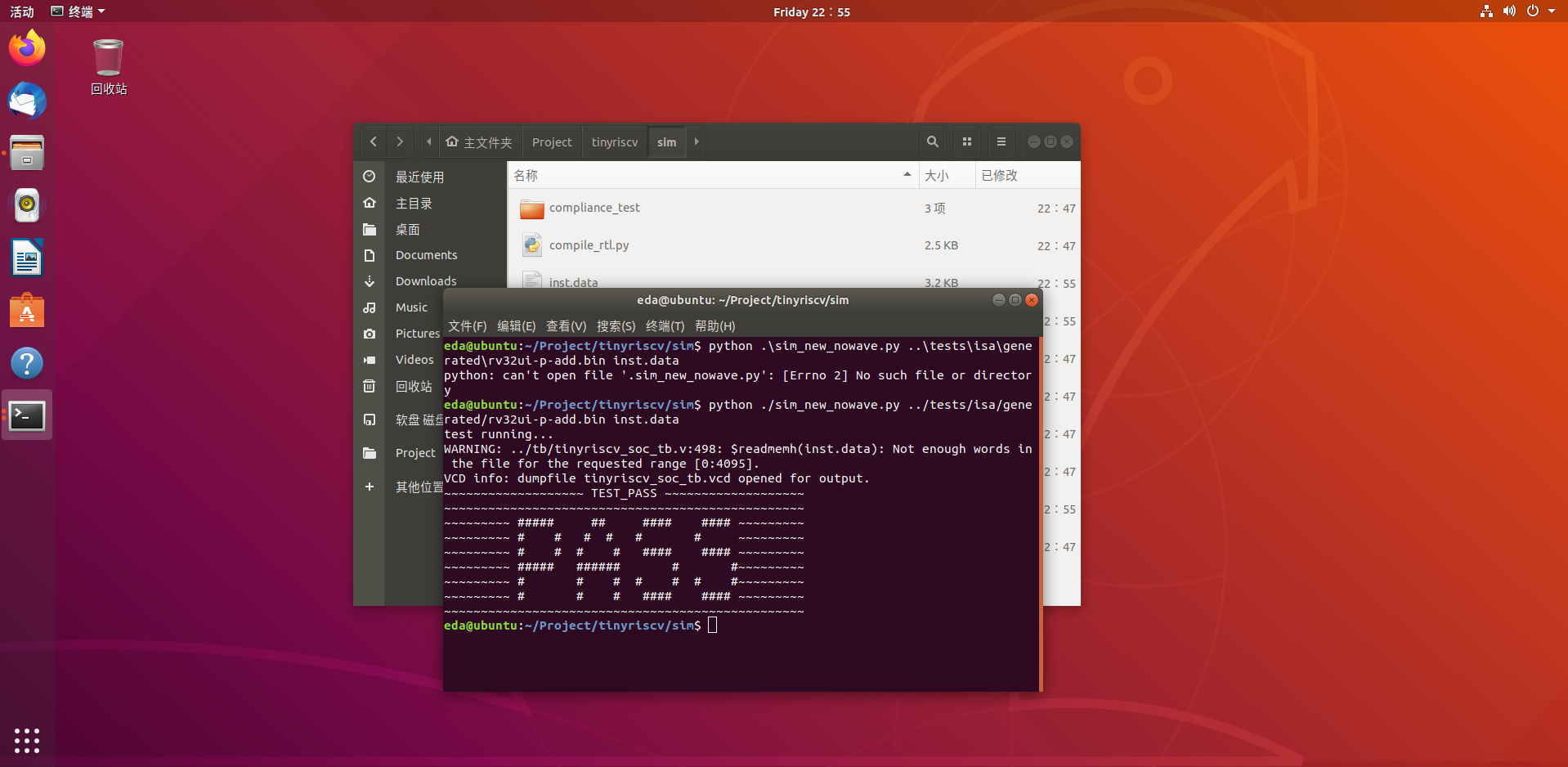
顺利运行得到结果。
找到当前目录下的tinyriscv_soc_tb.vcd文件双击启动gtkwave查看
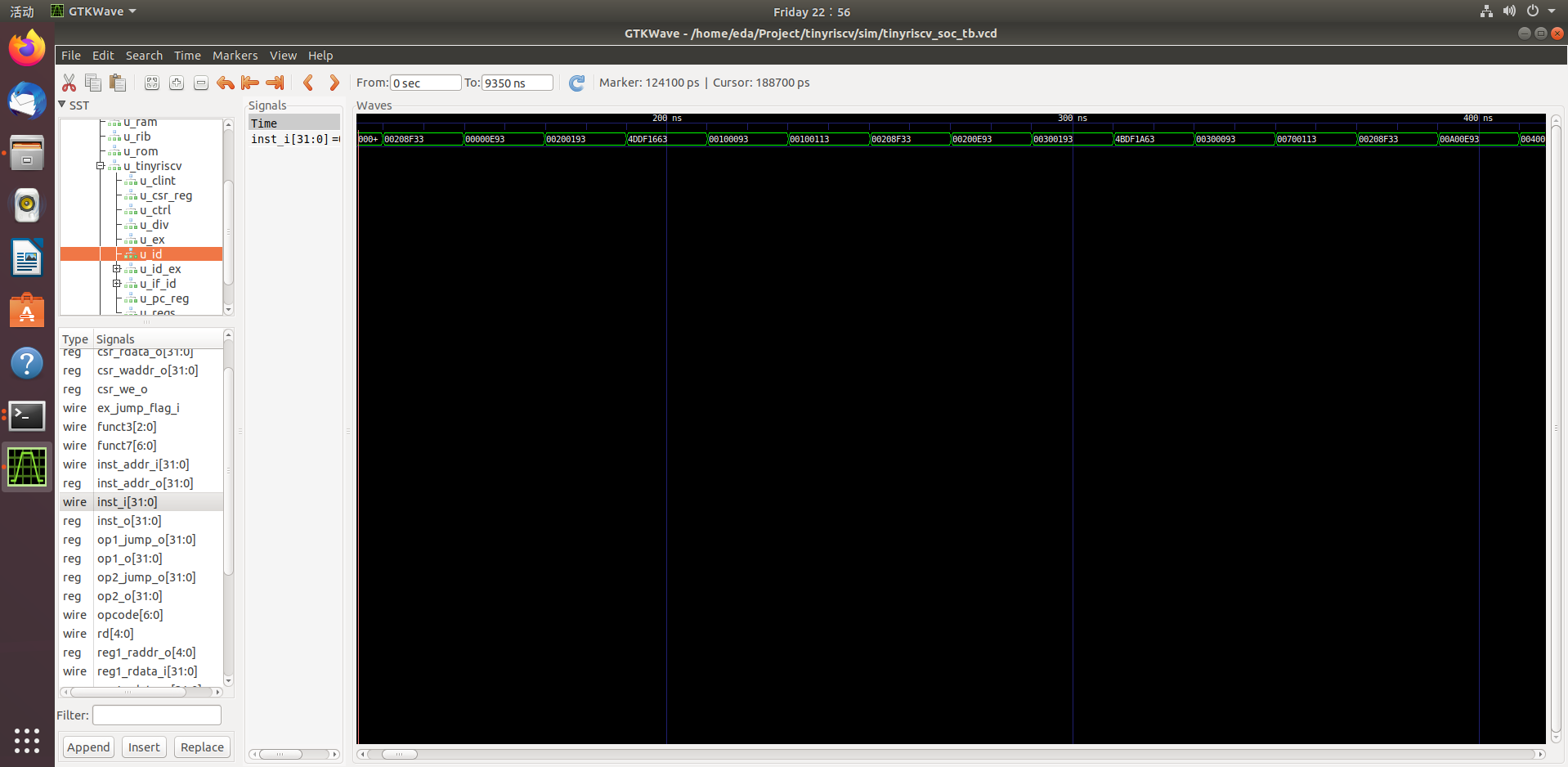
基本使用没有问题。
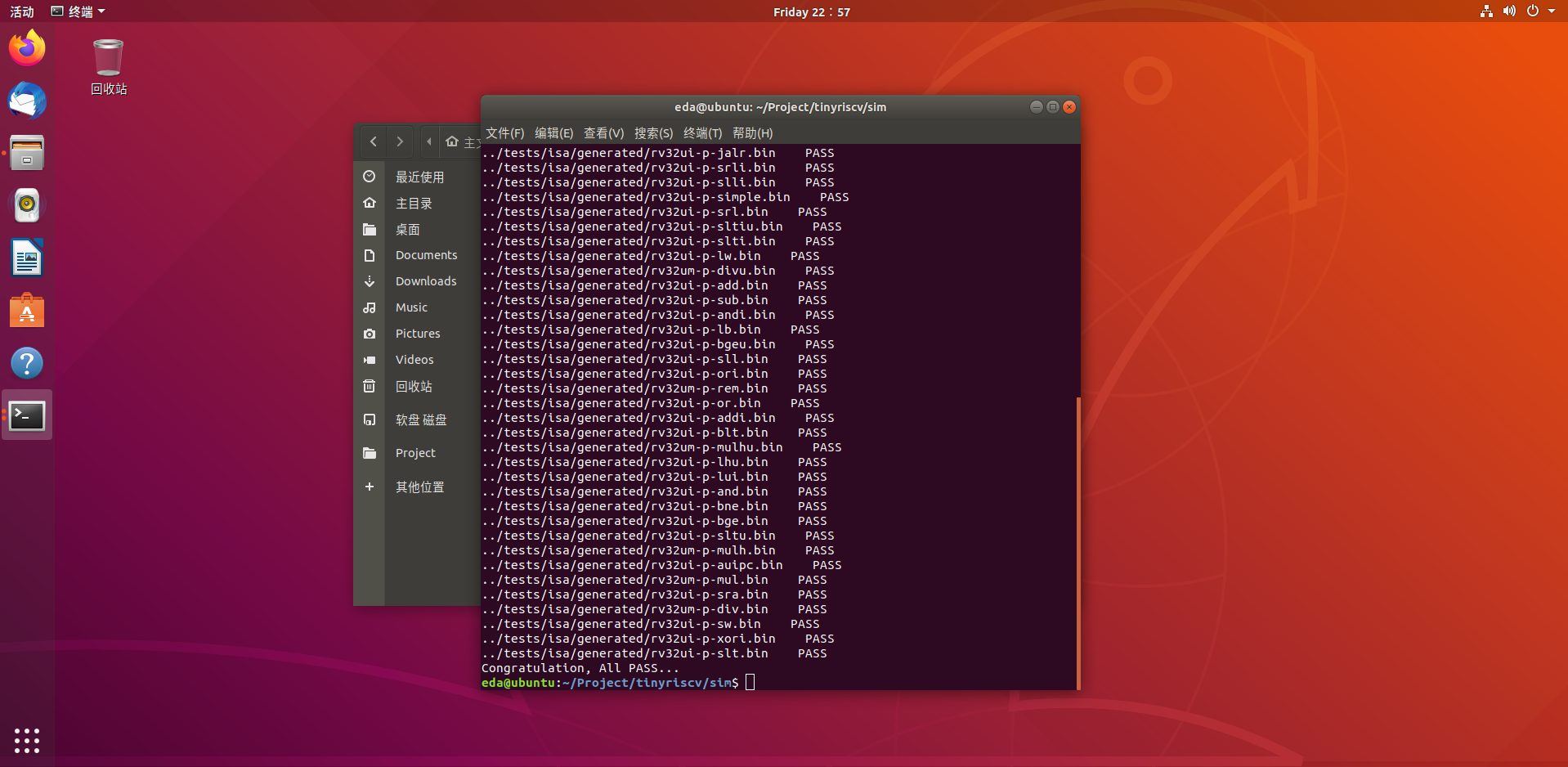
测试所有指令集
1 | |
测试新指令集
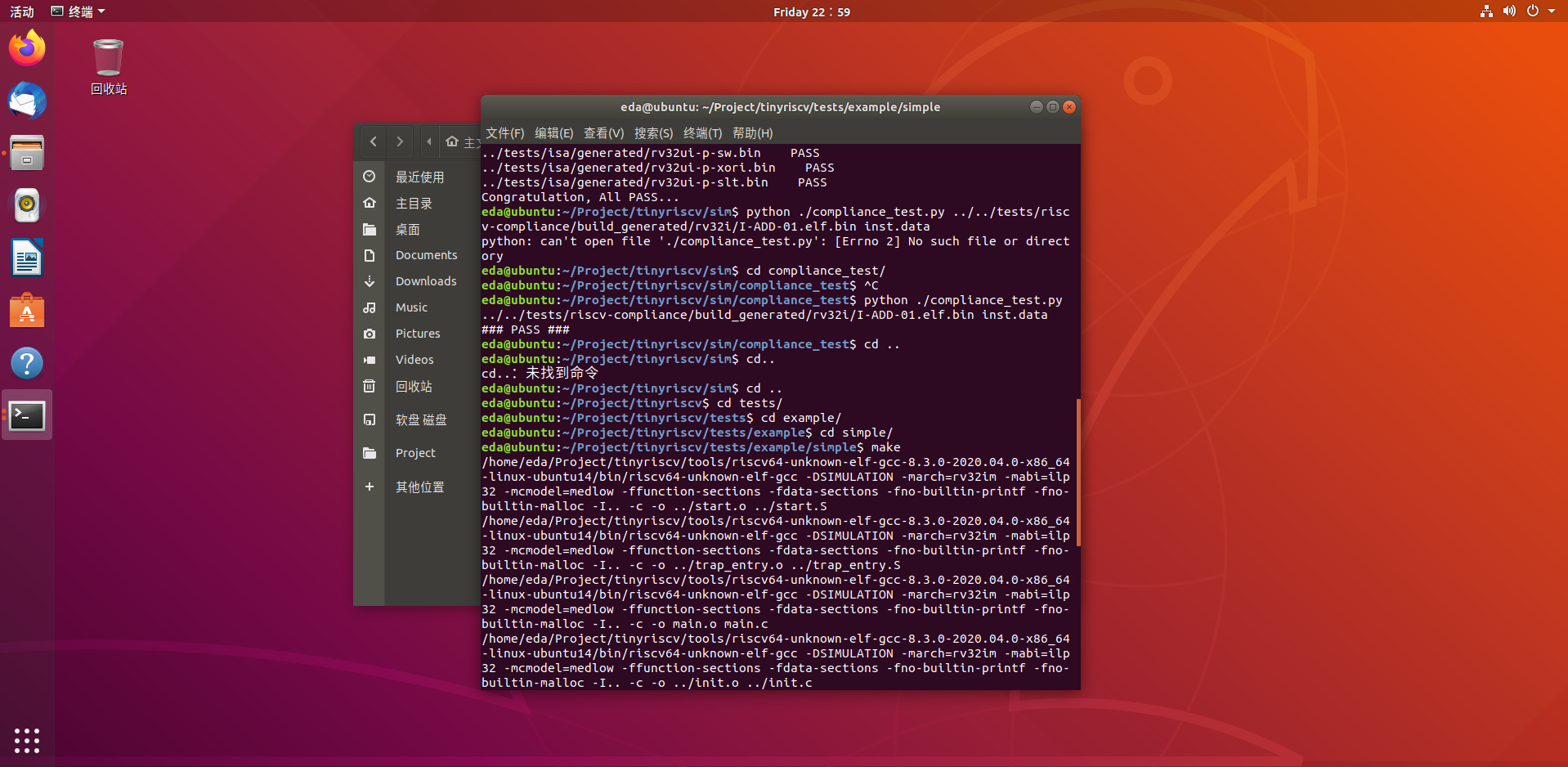
进入到sim/compliance_test目录,执行以下命令:
cd compliance_test
python ./compliance_test.py ../../tests/riscv-compliance/build_generated/rv32i/I-ADD-01.elf.bin inst.data
得到PASS表明通过。
接下来测试c文件编译
进入到tests\example\simple目录,执行以下命令编译:
make
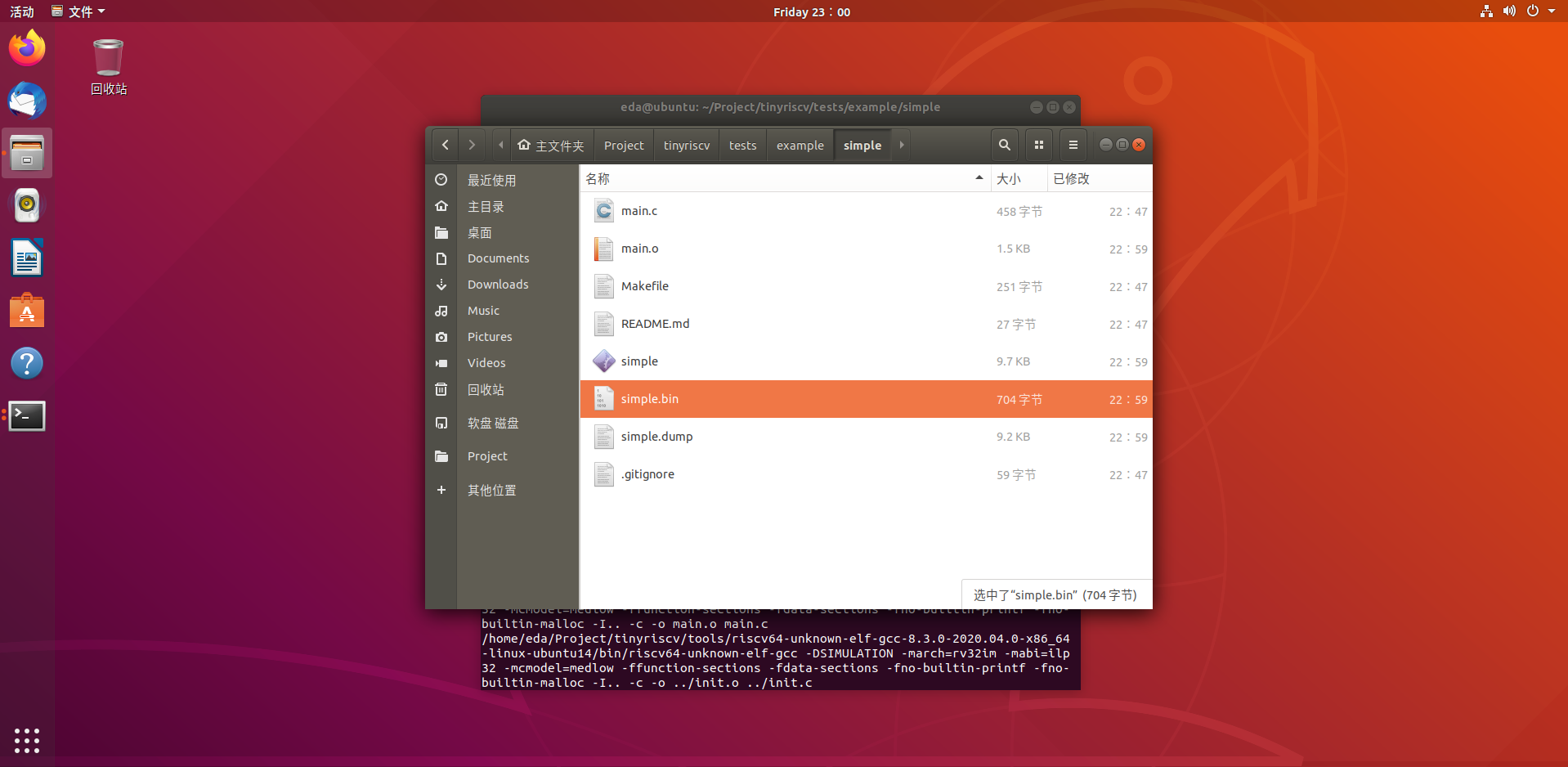
在该目录下回生成.bin文件
编译成功之后,进入到sim目录,执行以下命令开始测试:
python ./sim_new_nowave.py ../tests/example/simple/simple.bin inst.data

通过,那么至此基本仿真已经没有问题了。
下面测试FPGA移植。
FPGA移植准备
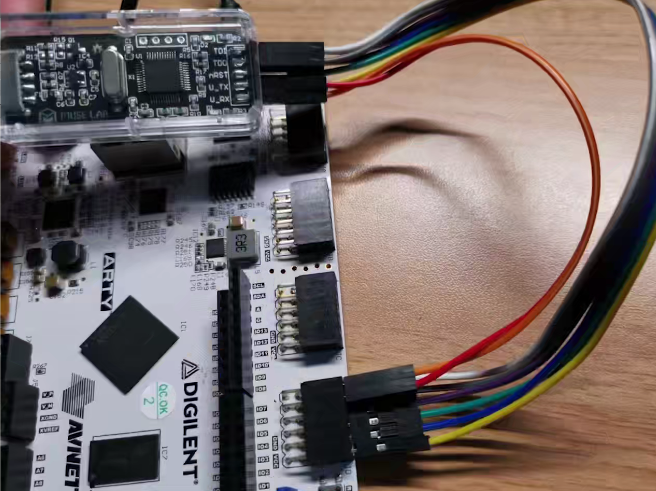
移植需要准备vivado集成开发环境和FPGA,CMSIS-DAP调试器。
我这里安装的是vivado2017.4和Digilent 的 ARTY A7 35T开发板
安装vivado需要准备安装包和许可文件,请自行准备。
此处不能拖拽进虚拟机,需要利用共享文件夹的方式。
在虚拟机设置中,将USB兼容性先修改为USB 3.1

切换到“选项”
启用共享文件夹,不需要关机。
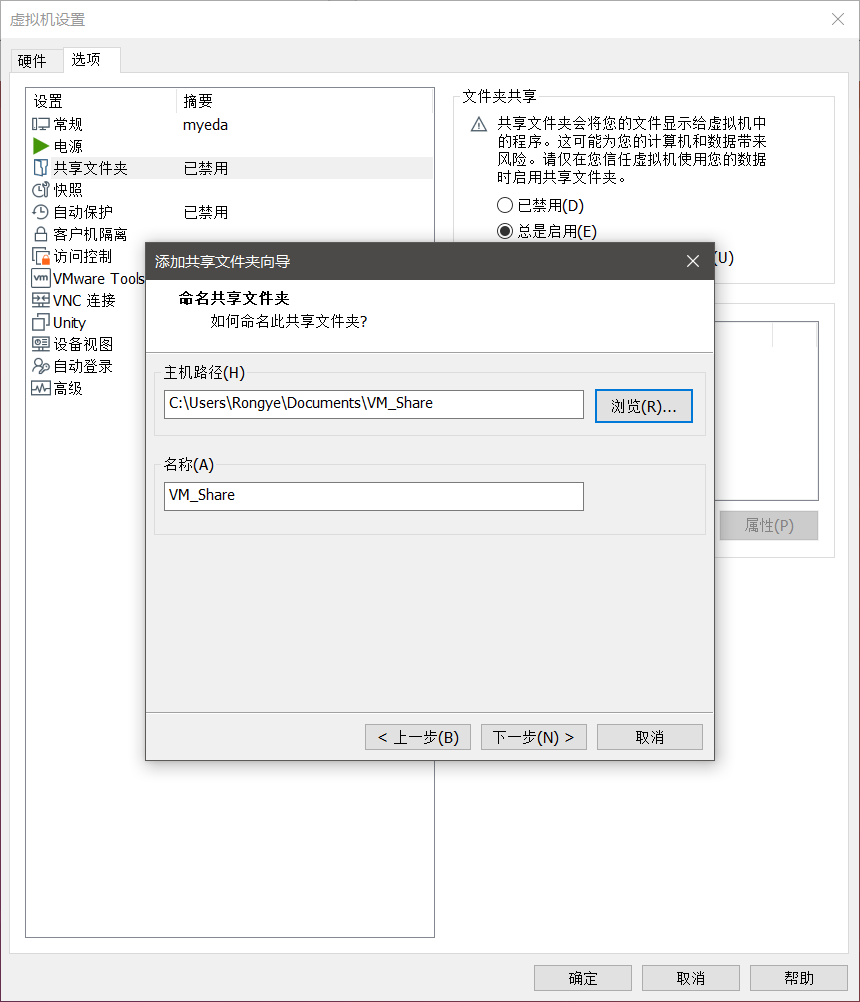
之后在根目录/mnt/hgfs/就可以找到自己的共享文件夹了。
进入安装包文件夹,
赋予安装权限
chmod +x xsetup
执行命令
./xsetup
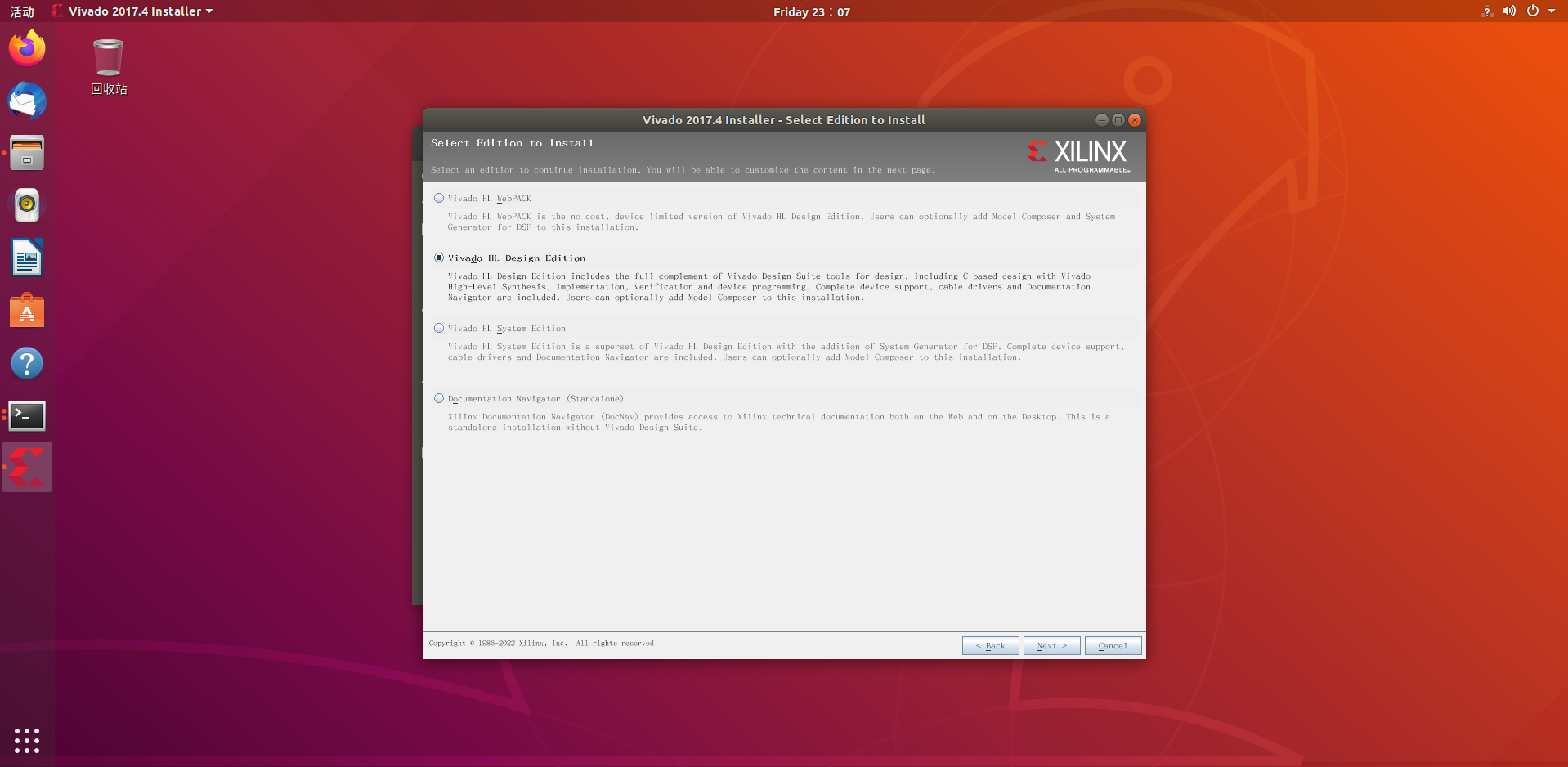
启动安装引导
安装过程和windows下没有区别。
安装路径要在/home下,不然空间不足。此处建立了一个EDA_Tools目录供后续各种工具安装。

安装末尾载入许可文件。
在vivado/2017.4目录下找到settings64.sh配置文件。
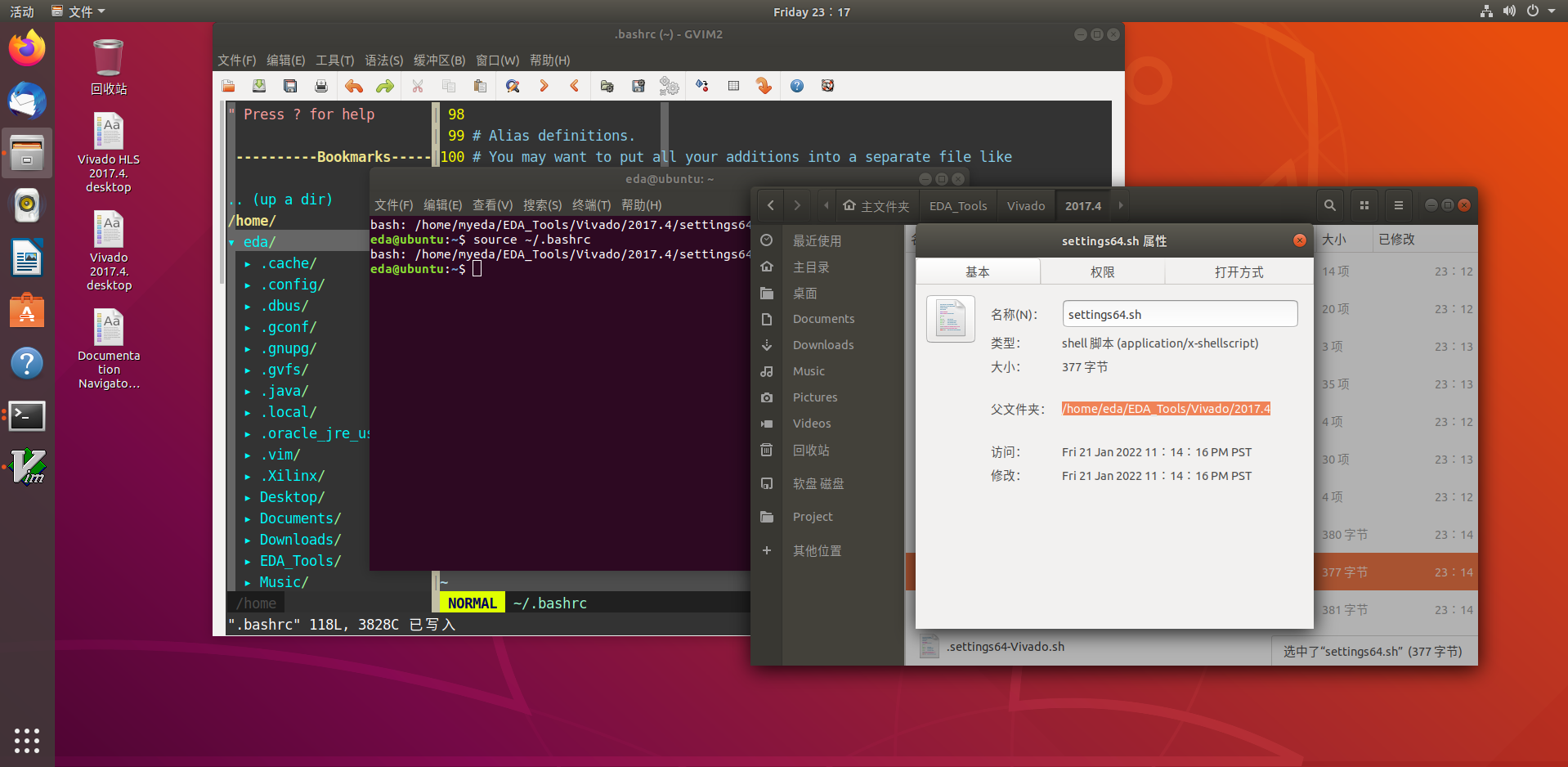
编辑主目录配置文件
vim ~/.bashrc
在末尾添加路径
source /home/eda/EDA_Tools/Vivado/2017.4/settings64.sh
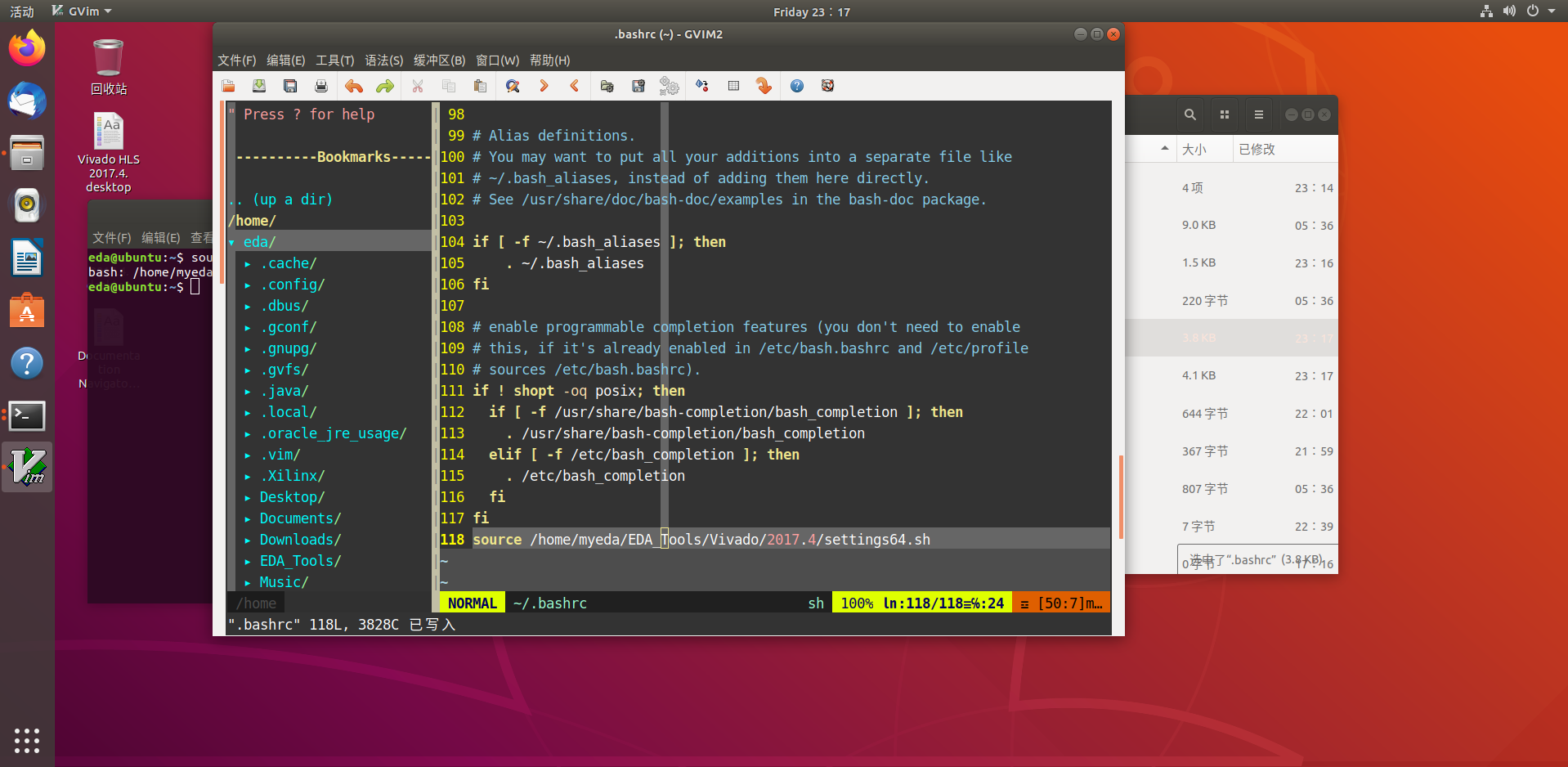
然后重新加载环境配置
source ~/.bashrc
至此应该就可以启动vivado了。
vivado &
启动vivado
顺利启动以后先关闭,处理一些剩余内容。
先把xilinx的信息中心卸载掉。
找到这个软件,打开。

直接卸载就行。
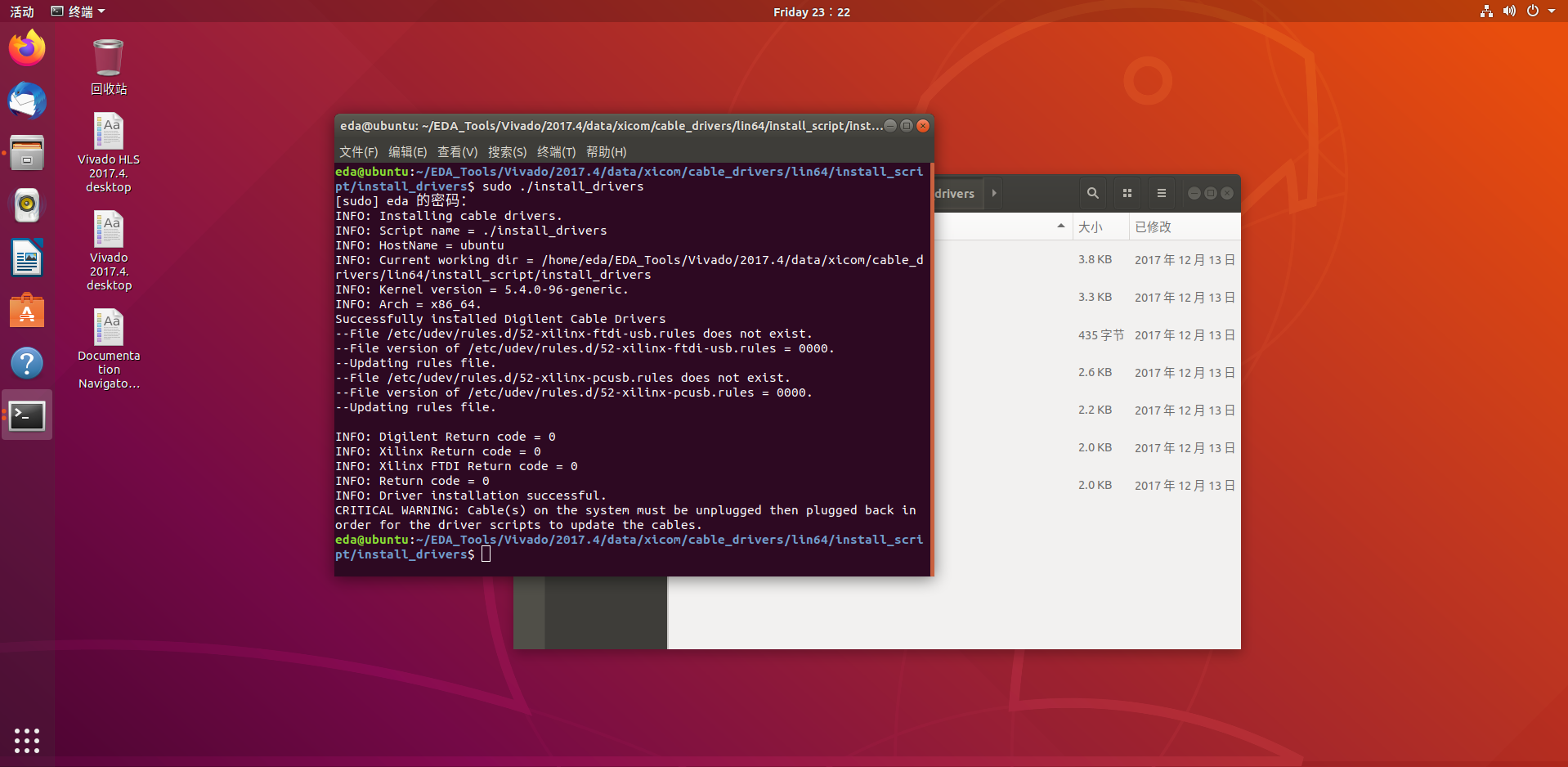
接着补充安装驱动,否则后续可能无法烧写板子。
/home/eda/EDA_Tools/Vivado/2017.4/data/xicom/cable_drivers/lin64/install_script/install_drivers
在这个路径下,打开终端。
安装驱动。
sudo ./install_drivers
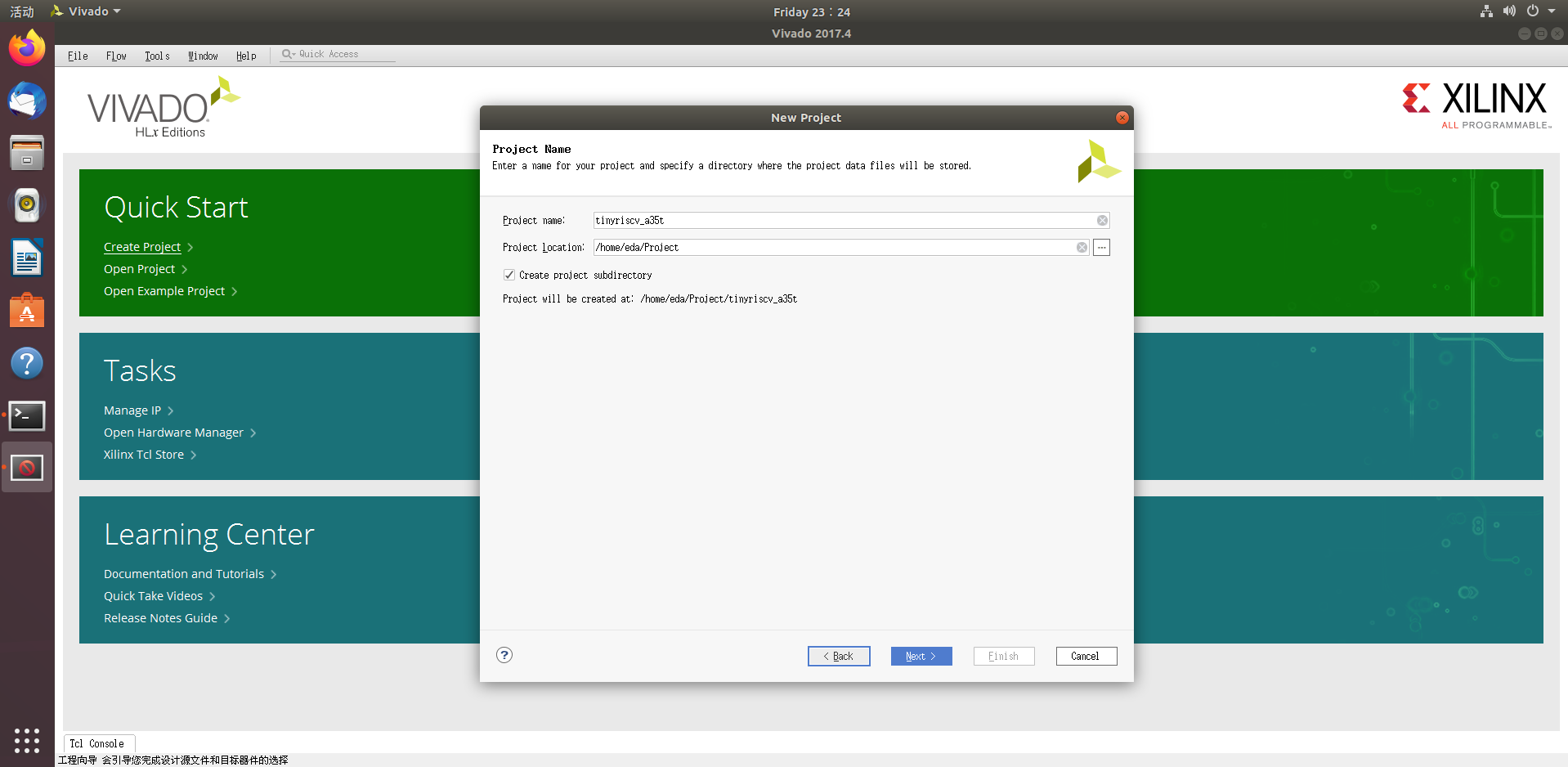
那么vivado也准备完毕以后,开始移植tinyriscv到FPGA上
FPGA移植工作
新建工程
我的板子ARTY A7 35T
器件属性选择xc7a35ticsg324-1l
添加源文件
将tinyriscv下整个RTL添加复制进来
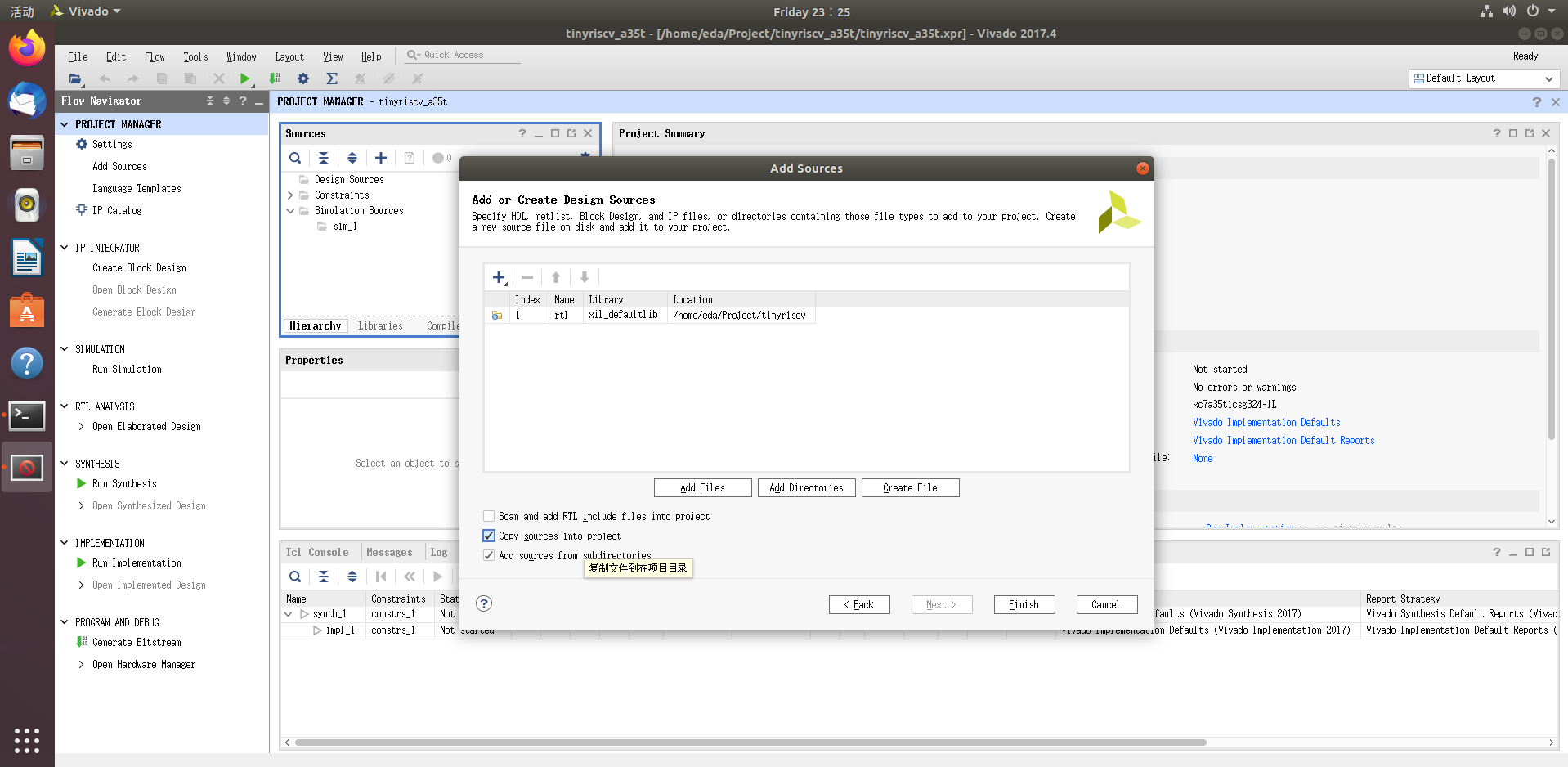
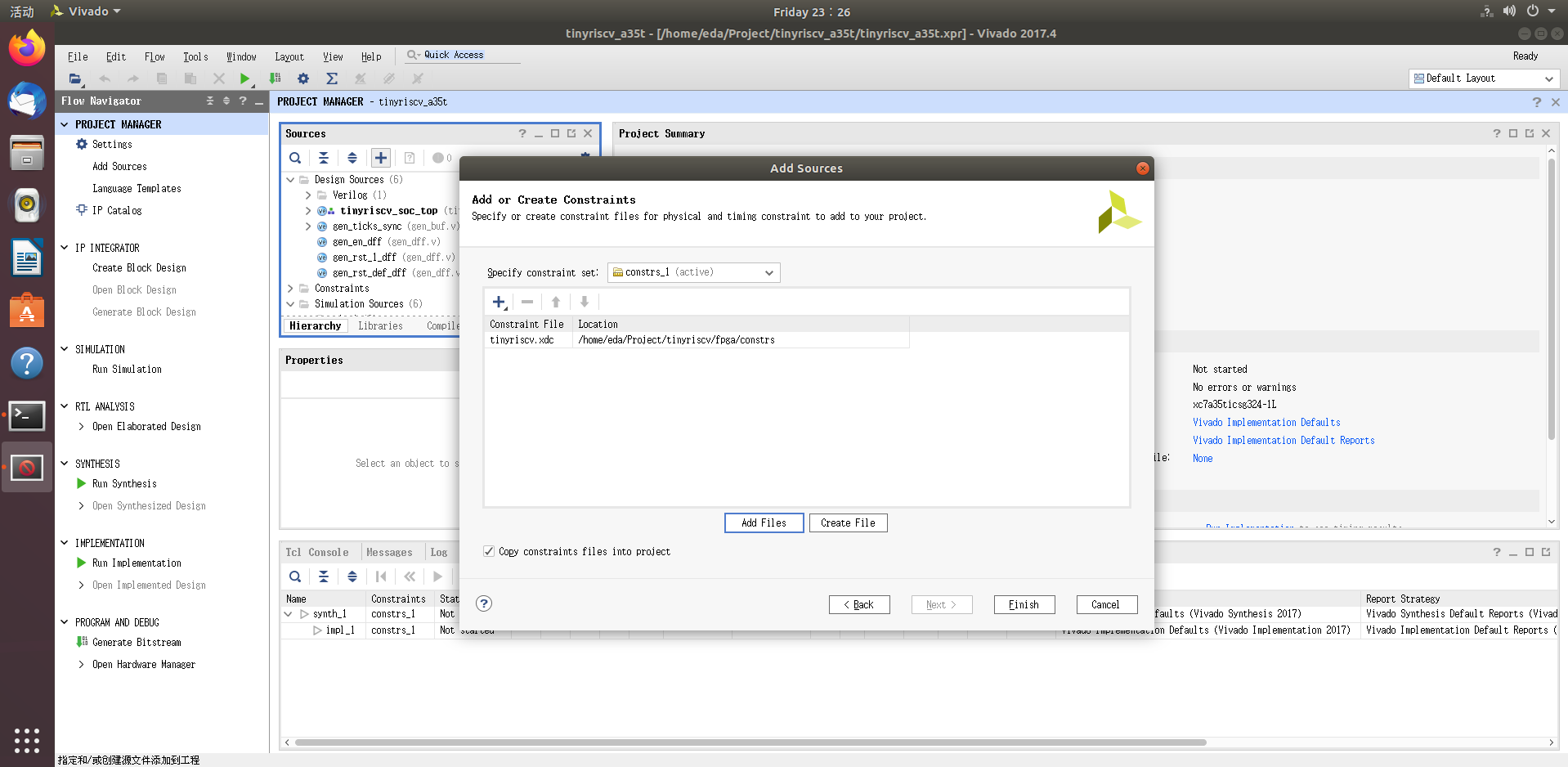
将tinyriscv下fpga/constrs下的.xdc约束文件添加进来。
打开约束文件,根据自己的开发板进行修改。此处为我自己的约束。
重点关注时钟,我是100M的时钟,等会还要用PLL分频。
GPIO0,1。我分配给了一个LED和一个SW拨码开关。
JTAG和UART使用调试器CMSIS-DAP的相应接口。
都根据自己开发板的原理图来。
1 | |
接下来添加锁相环PLL,
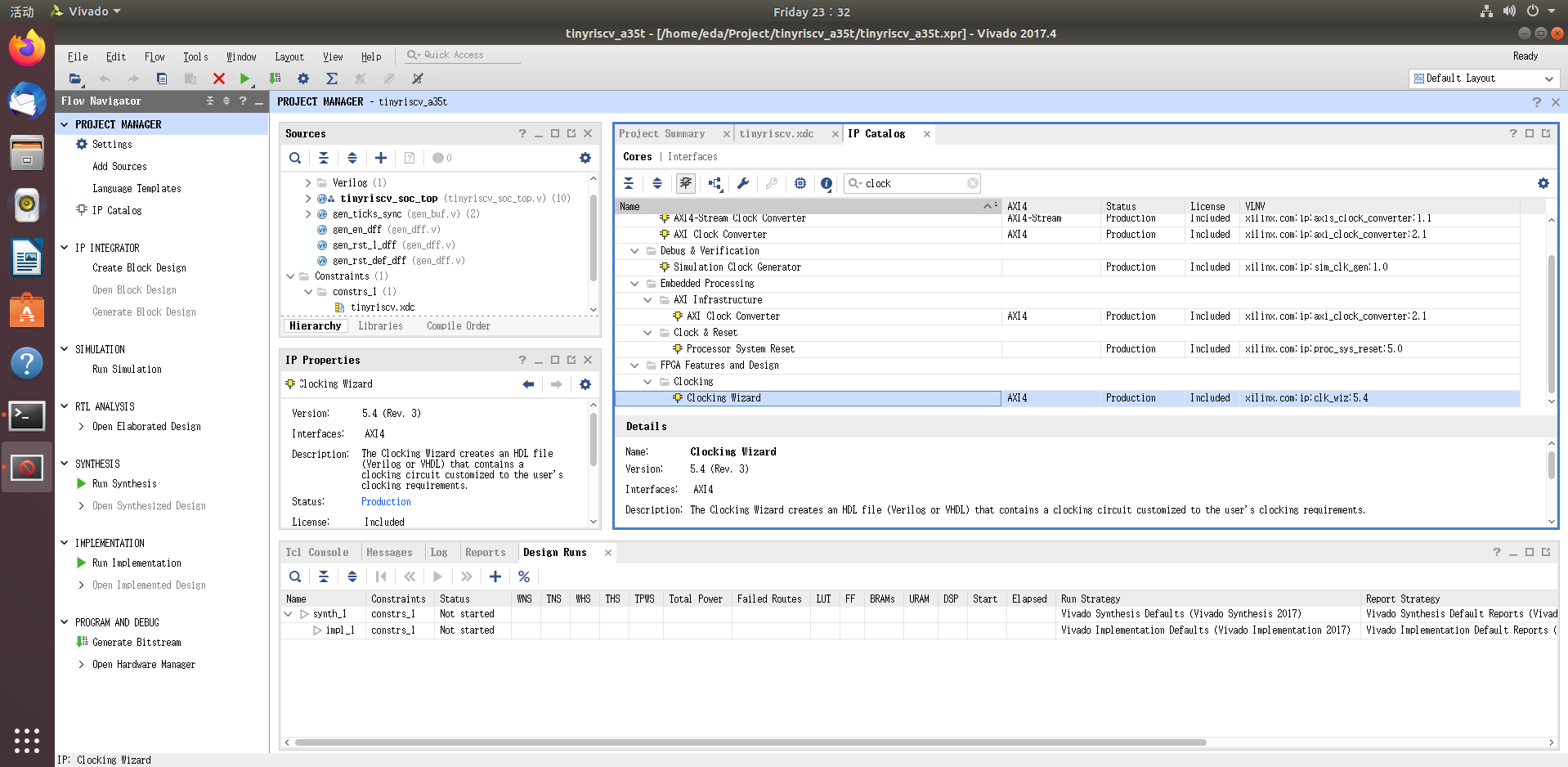
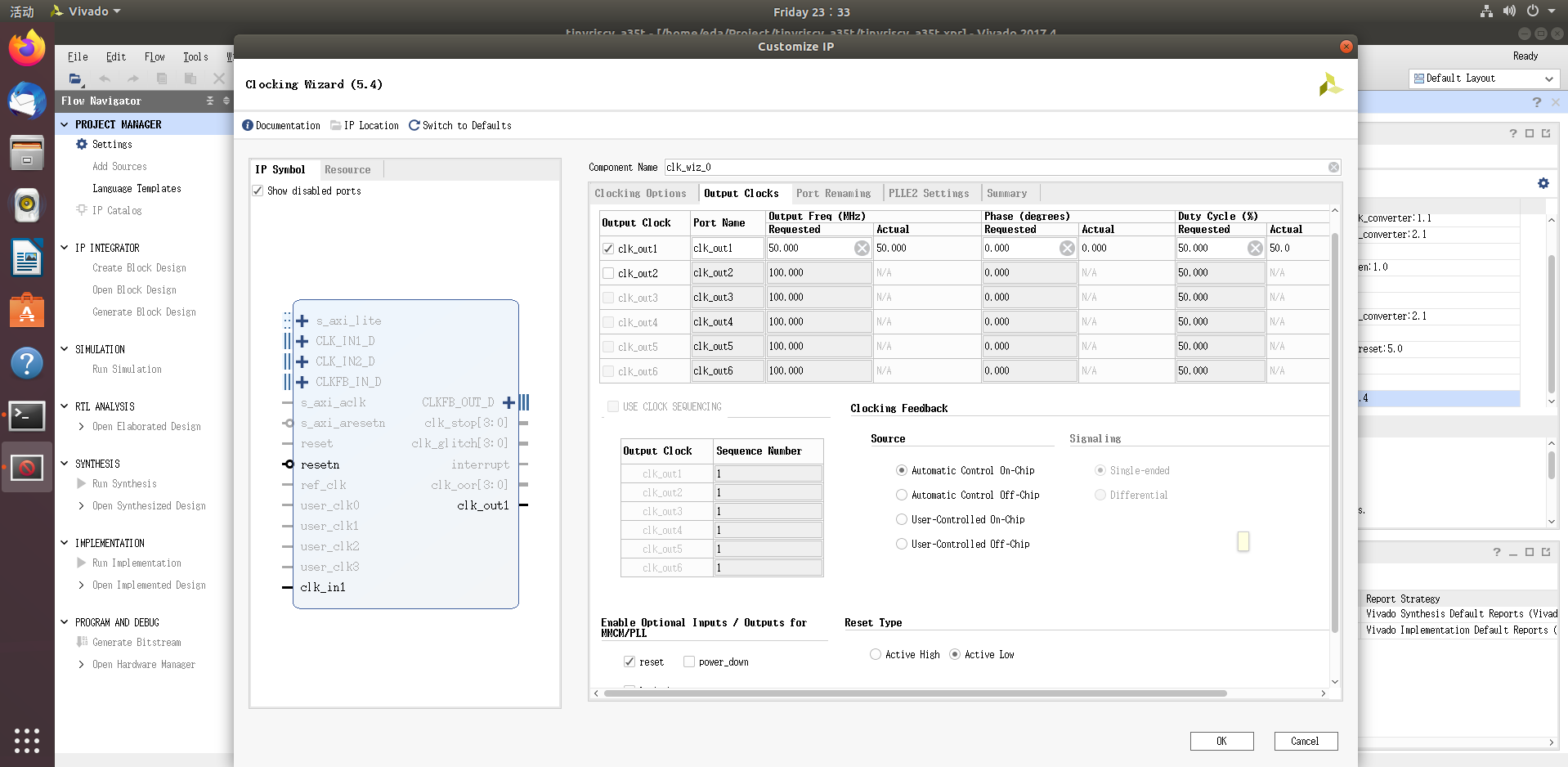
配置IP输出50M时钟
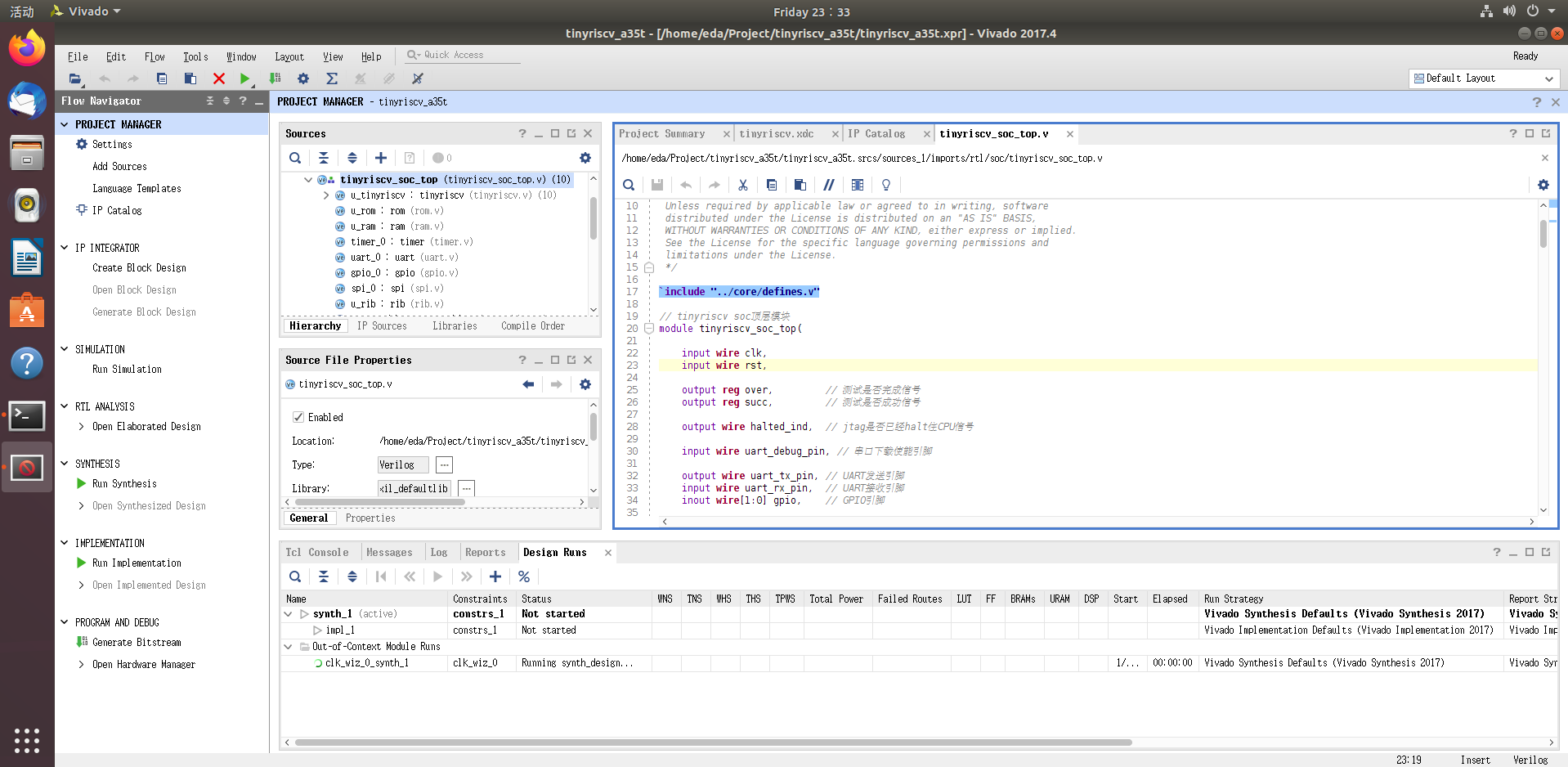
打开顶层文件,修改端口clk为sys_clk
往下,在第一个always块前例化PLL
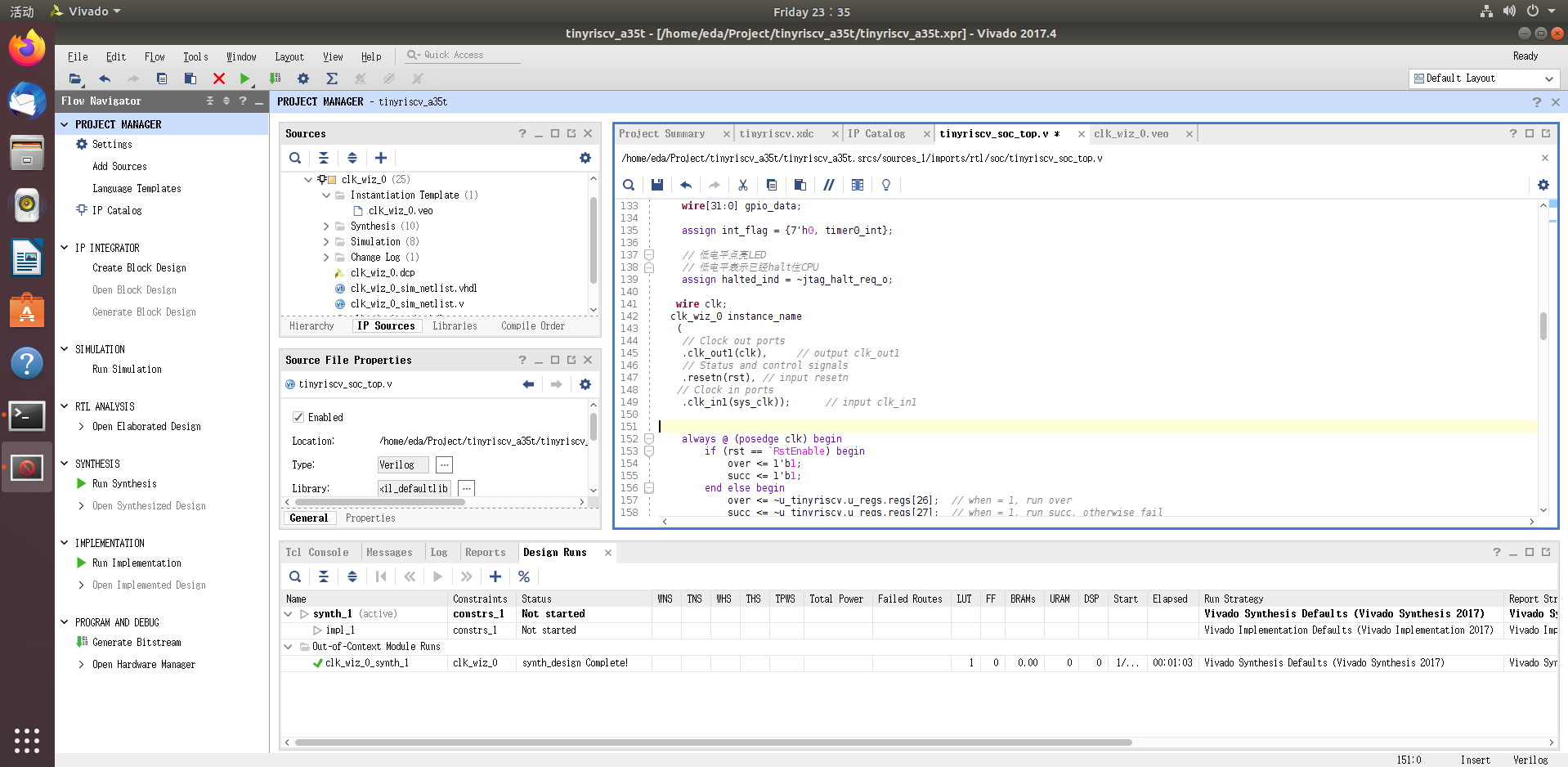
记得补充声明clk,
至此完成所有FPGA工程配置,生成比特流文件
顺利生成比特流文件,连接开发板直接烧写。
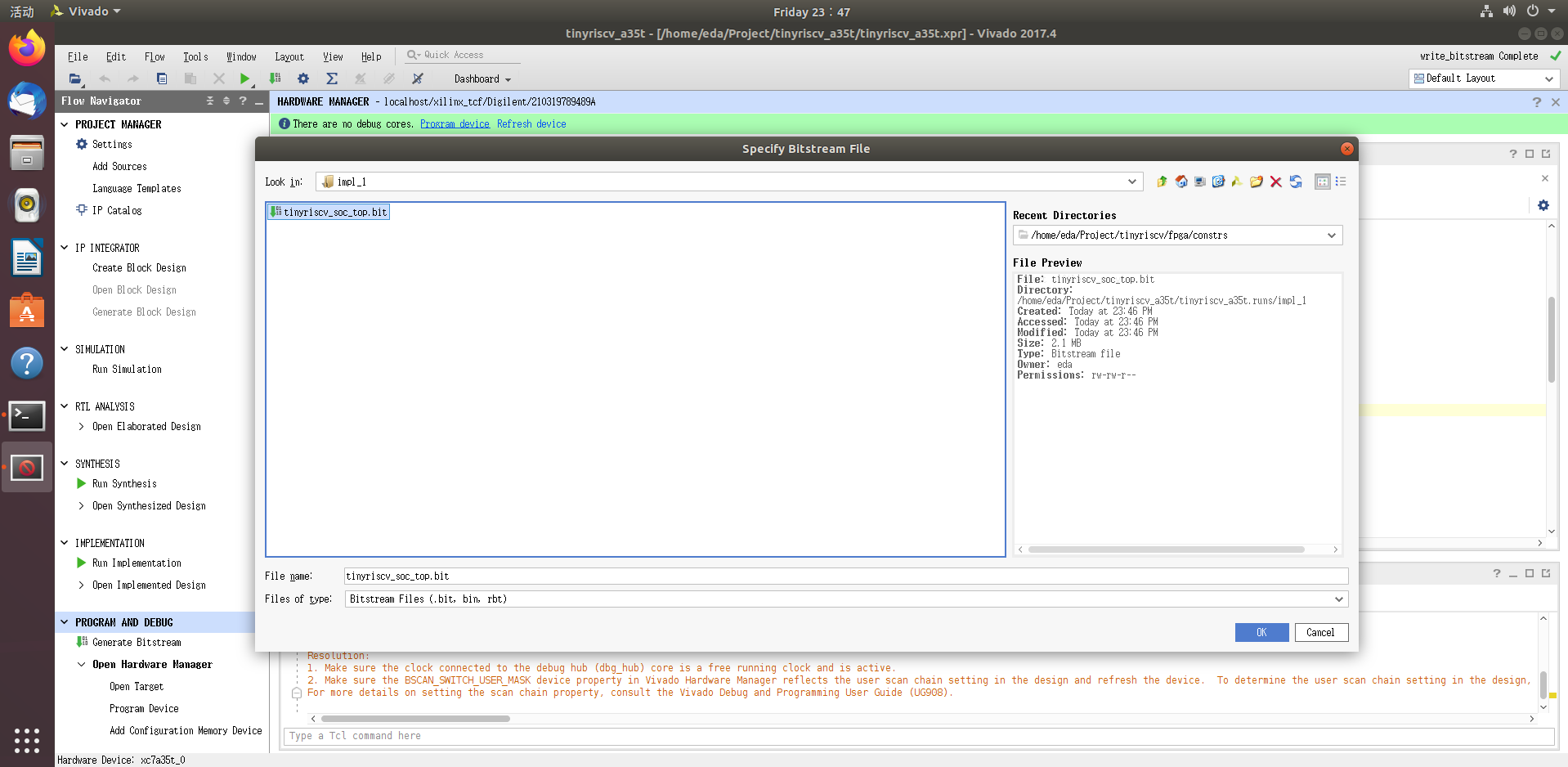
烧写时可能需要重新定位一下,自己生成的bit文件。
板子上的LED亮起,说明顺利烧写进去了,
接下来进行JTAG调试。
FPGA运行调试
调试需要使用到CMSIS-DAP,连好线,做好管脚约束才能使用。
同时还需要上位机,作者提供的只有exe也就是windows下的软件。
*注意,Linux下的openocd安装非常麻烦,我遇到了很多问题,虽然现在顺利安装并使用了。
不介意的话后续工作可以直接在windows上进行,把一些文件直接拖到windows下使用即可。
在Ubuntu下直接安装上位机openocd
sudo apt install openocd
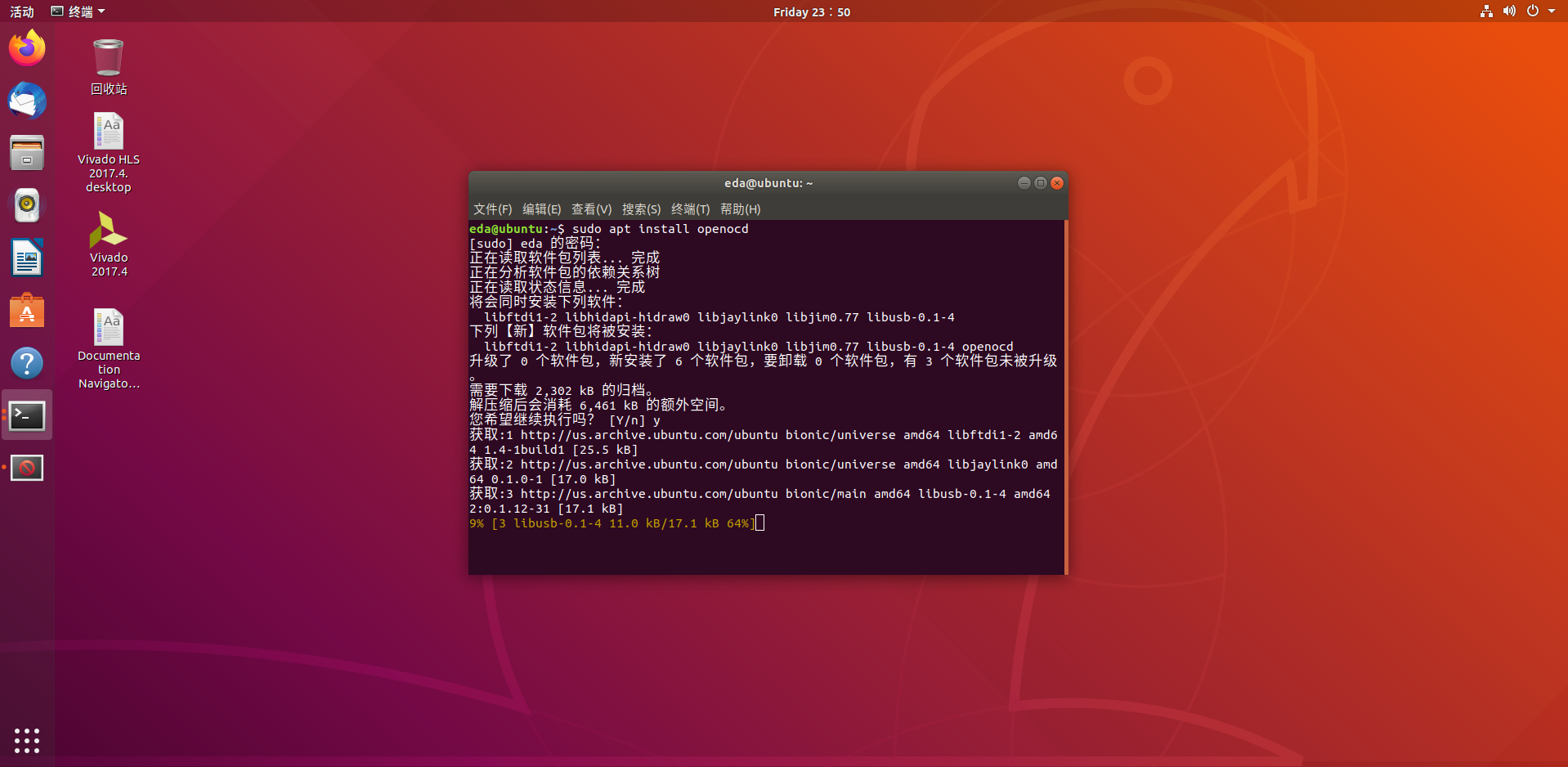

在tools/openocd目录下,我们需要使用到这个.cfg配置文件。
openocd -f tinyriscv.cfg
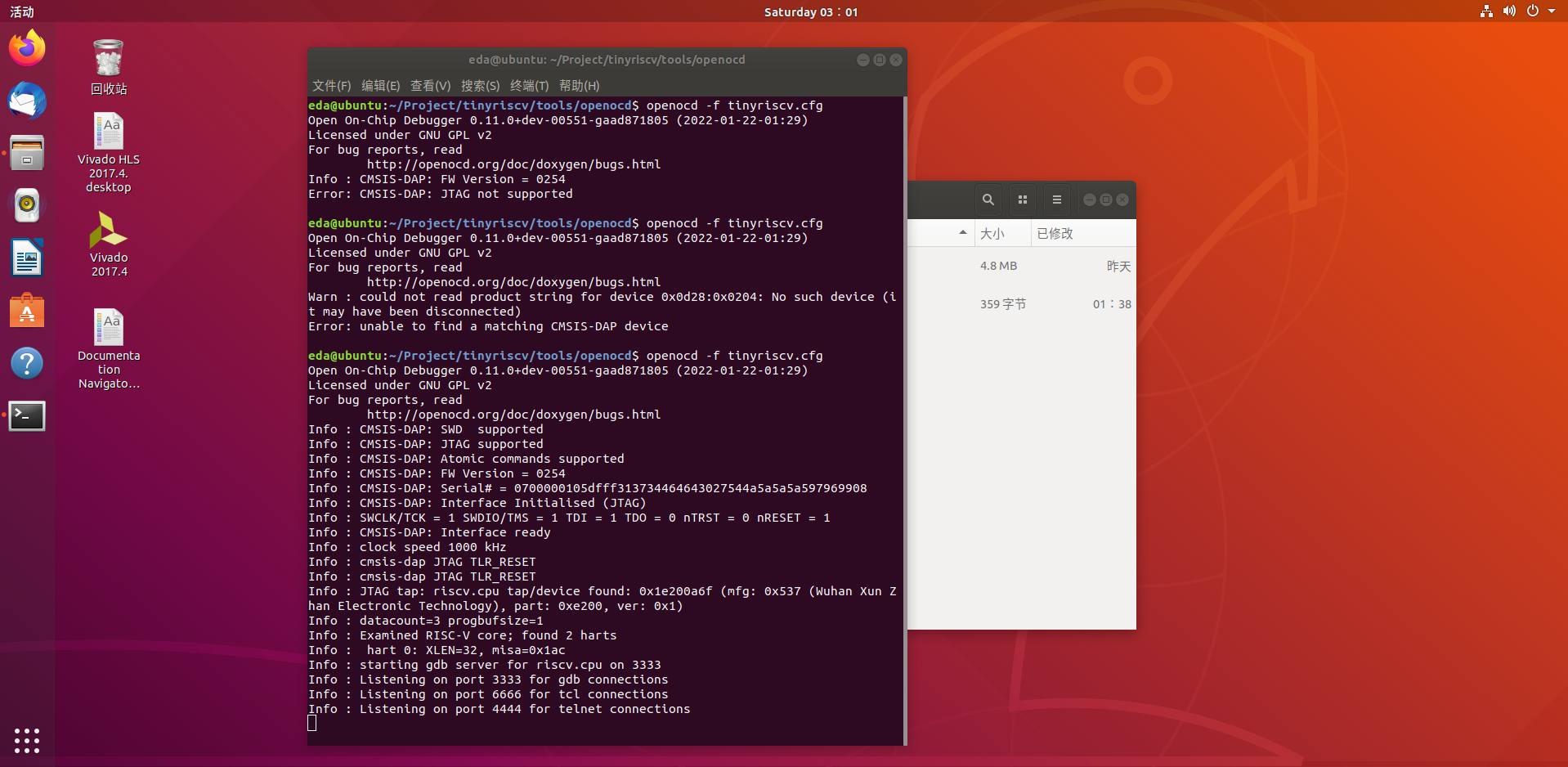
提示不行,这是因为默认安装的openocd不支持CMSIS-DAP,
所以我们还需要源码安装自己配置
sudo apt remove openocd先卸载掉原本安装的
进行源码安装,参考
https://blog.csdn.net/daoshengtianxia/article/details/115038674
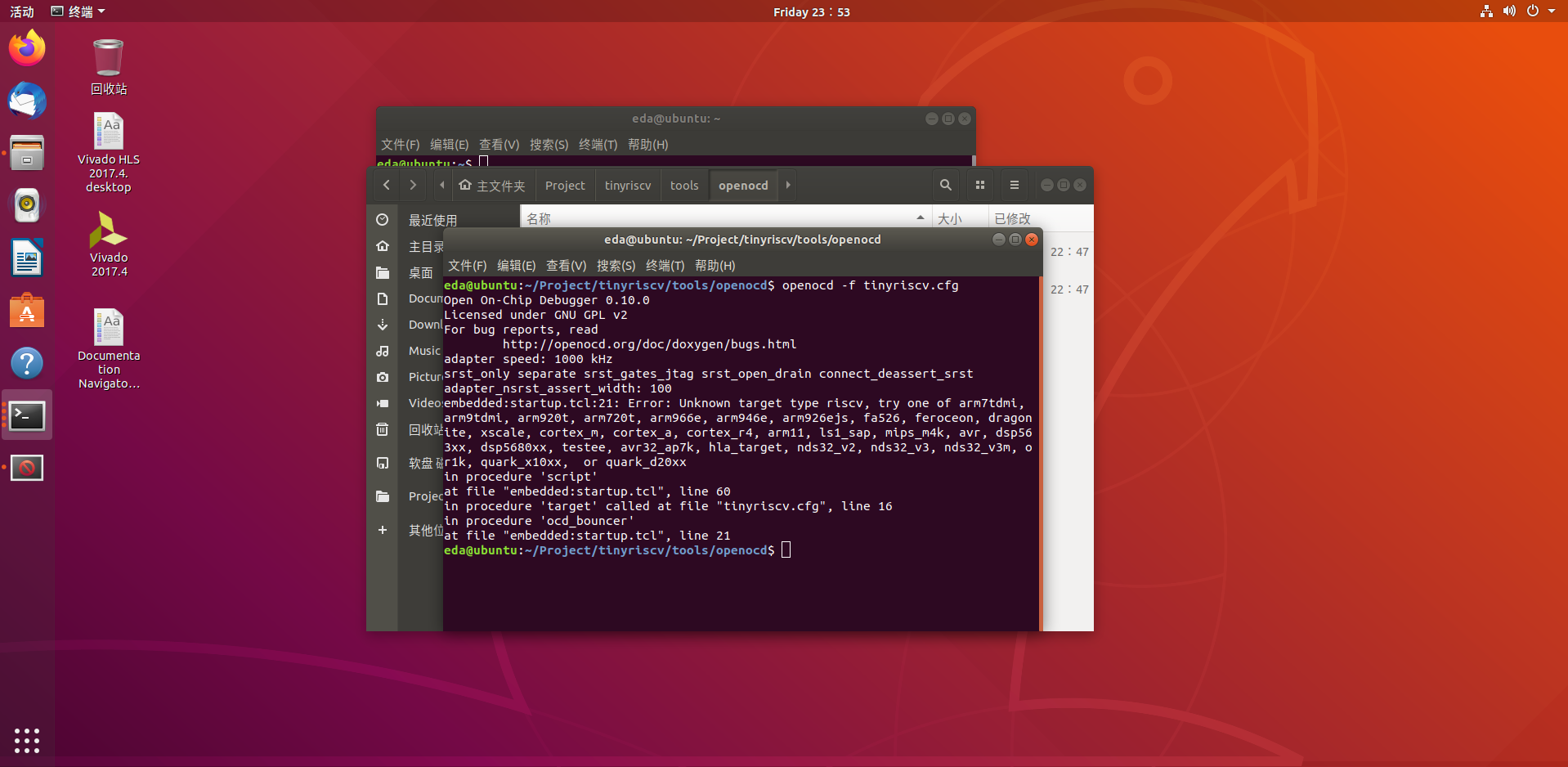
在Downloads目录下克隆
git clone git://github.com/ntfreak/openocd
cd openocd/
安装依赖
然后执行
./bootstrap
缺少了什么但又不清楚,补充安装了一大堆东西。
sudo apt install debhelper findutils autotools-dev autoconf automake libtool pkg-config libltdl-dev
重新执行
./bootstrap
缺少libusb-1.x,补充安装
sudo apt install libusb-1.0
再次configure
这次应该是顺利配置了
再补充下面这个
./configure –enable-cmsis-dap –enable-jlink –enable-stlink –enable-ti-icdi
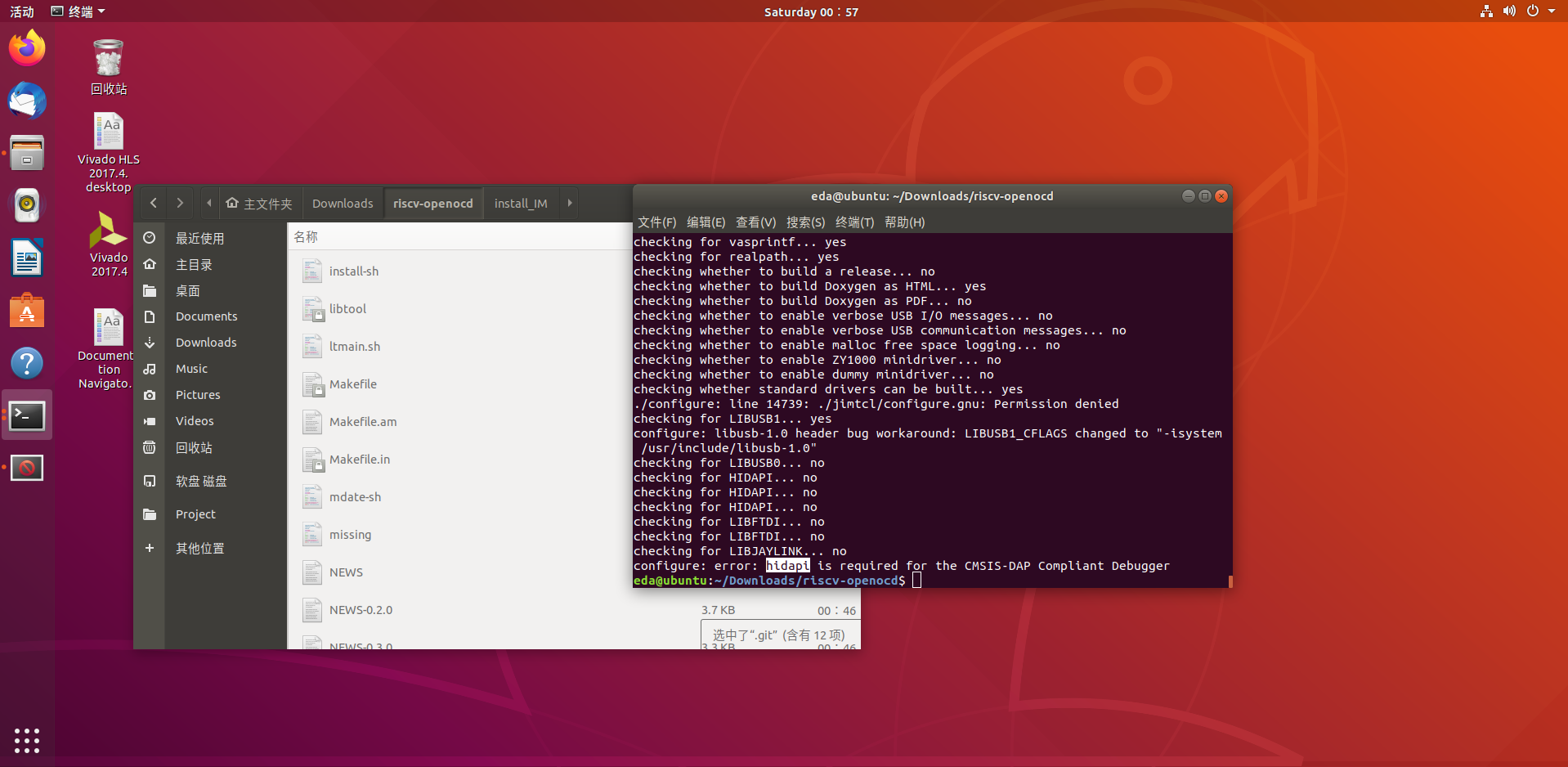
提示需要hidapi,
sudo apt-get install libhidapi-dev
其实是要补充安装这个libhidapi的库,然后再配置。注意一定要给权限。
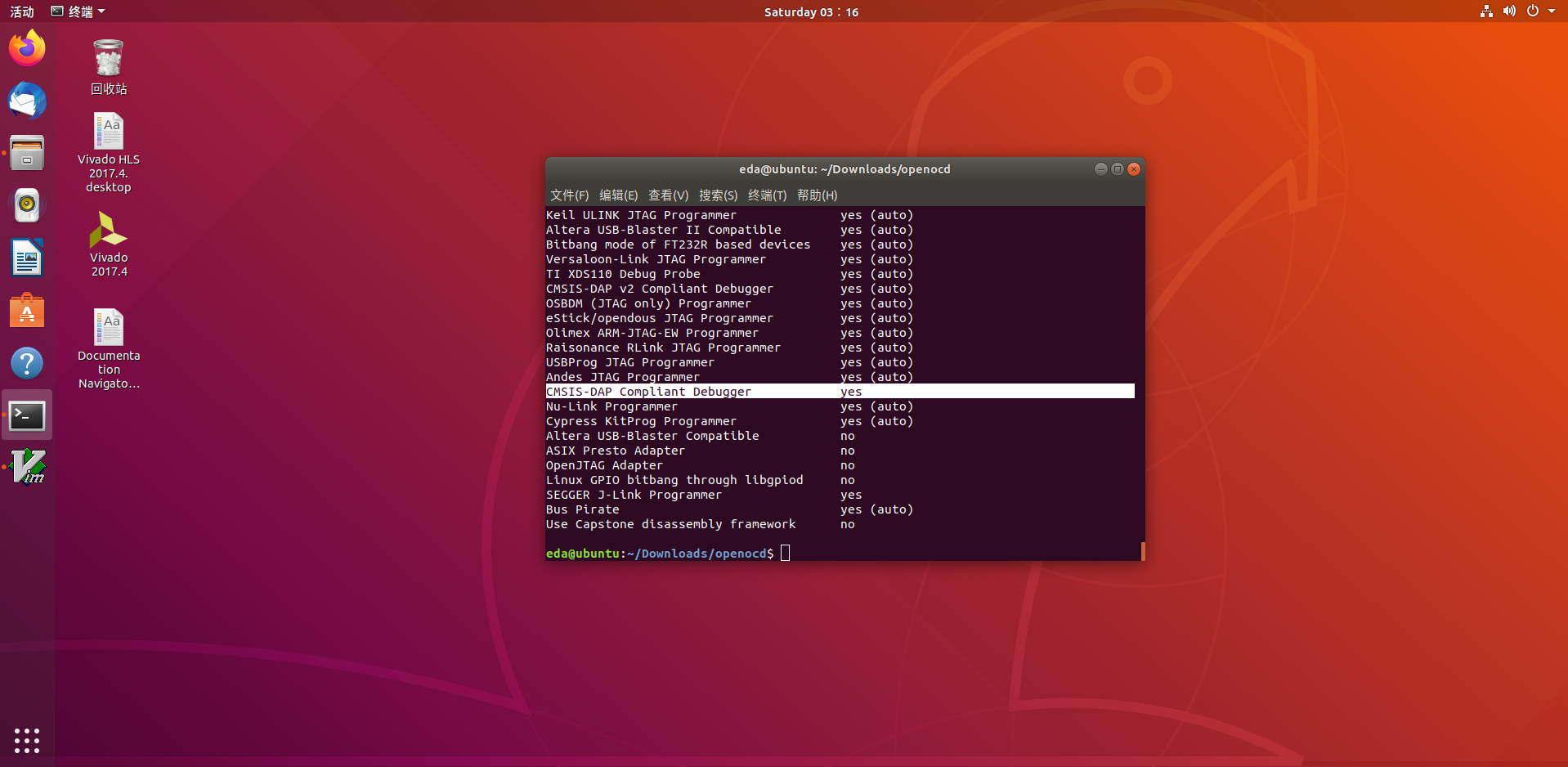
sudo ./configure –enable-cmsis-dap
配置成功一定要看到这个地方是yes的
最后编译安装
sudo make&make install
完成安装以后,回到tinyriscv/tools/openocd目录下
openocd -f tinyriscv.cfg
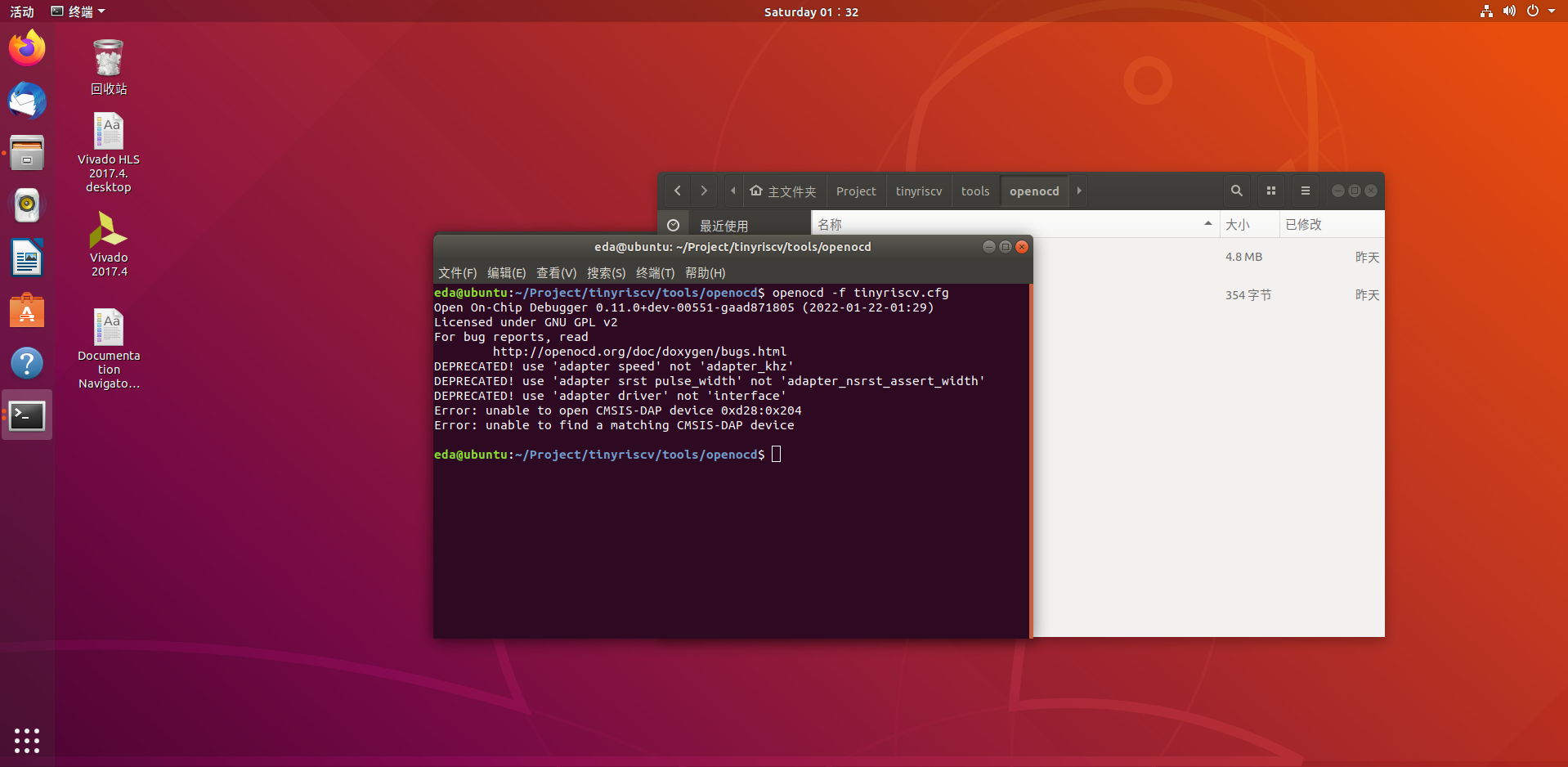
现在可以启用这个软件了,当然目前连接还是失败的,需要再做一些配置。
此外,首先需要对.cfg文件中的一些内容做修改。
根据上一张图,有提示说use”adapter speed”not’adapeter_khz’
意思就是用前面那个不要用后面那个表述,
打开.cfg就可以看到对应的内容了,改过来就行。
然后还需要准备权限,参考https://www.bbsmax.com/A/A2dm9B87de/
用lsusb
确认自己的调试器信息
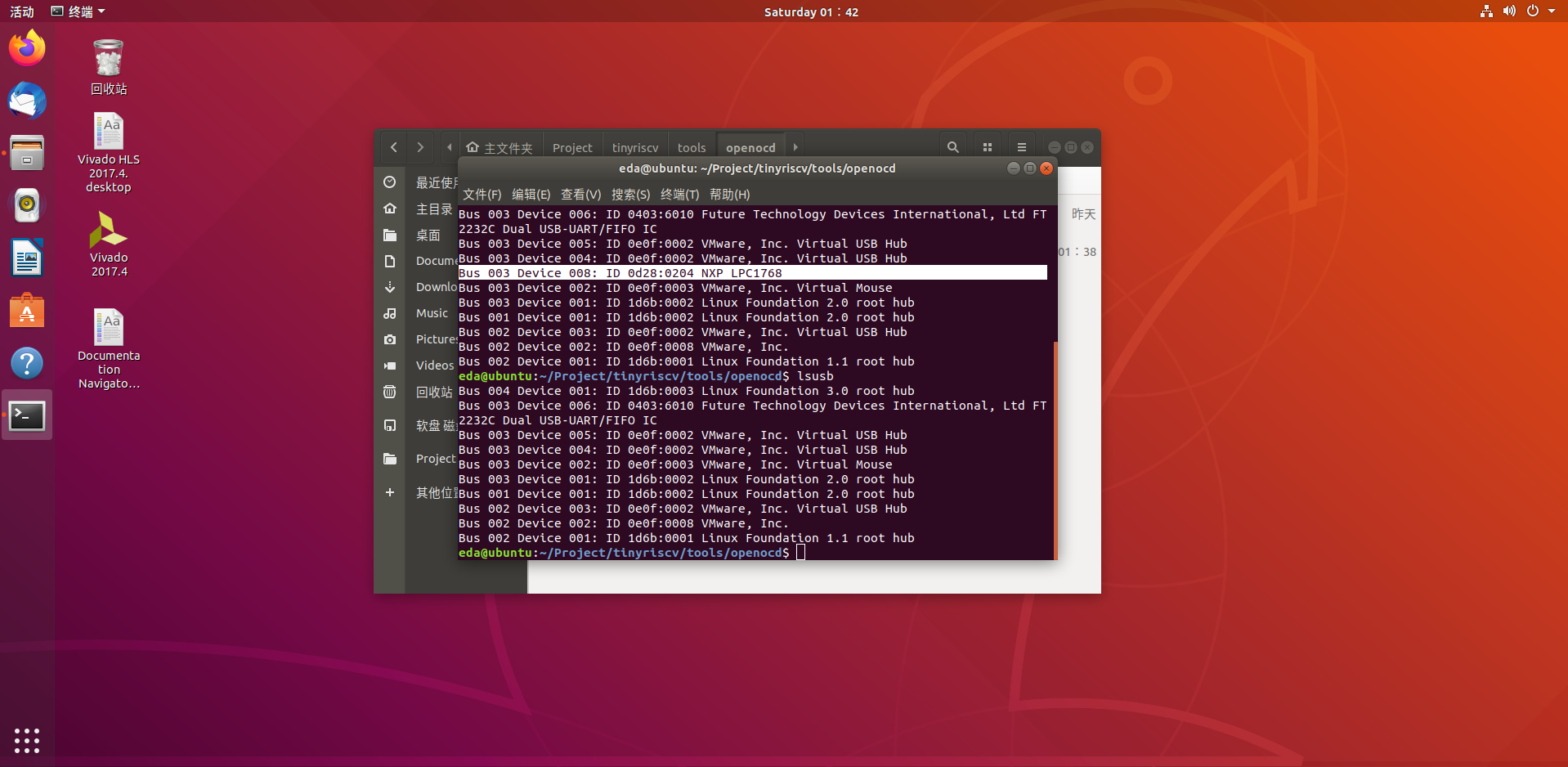
Bus 003 Device 008: ID 0d28:0204 NXP LPC1768
需要增加一个rules文件,参考https://blog.csdn.net/zhengyangliu123/article/details/78232241
进入前面克隆的openocd/contrib 目录
使用指令将 60-openocd.rules 文件复制入 /etc/udev/rules.d/ 目录下
sudo cp 60-openocd.rules /etc/udev/rules.d/
然后,对文件做一些修改【此处存疑,可能不改也能用】
sudo gvim /etc/udev/rules.d/60-openocd.rules
最下面的地方,改成跟我下图一样的。
注意idVendor和idProduct要保持和上面看到的0d28:0204设备信息一致。
保存以后重启电脑

回到之前的tinyriscv中的openocd文件夹,使用终端执行
openocd -f tinyriscv.cfg
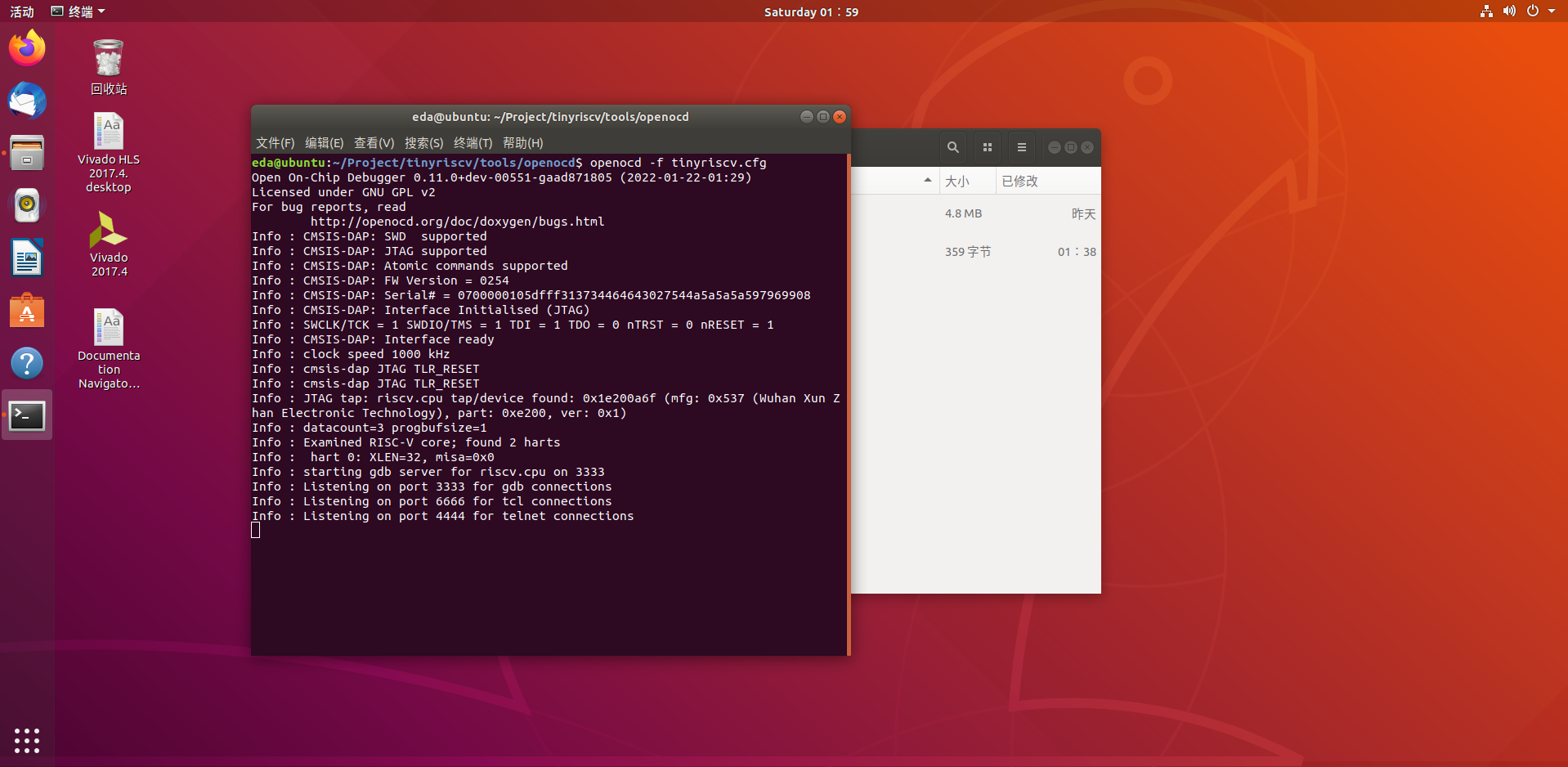
终于看到这个了,不容易啊
*注意,这里存在未知问题。每次重启系统以后,最开始使用openocd会报错。需执行3次,才会识别并启用……
原因不明,但每次都这样。只要启动成功,不关机就不会有这个问题。
新开一个终端,看作者后续的操作。windows和linux在路径上有些不同
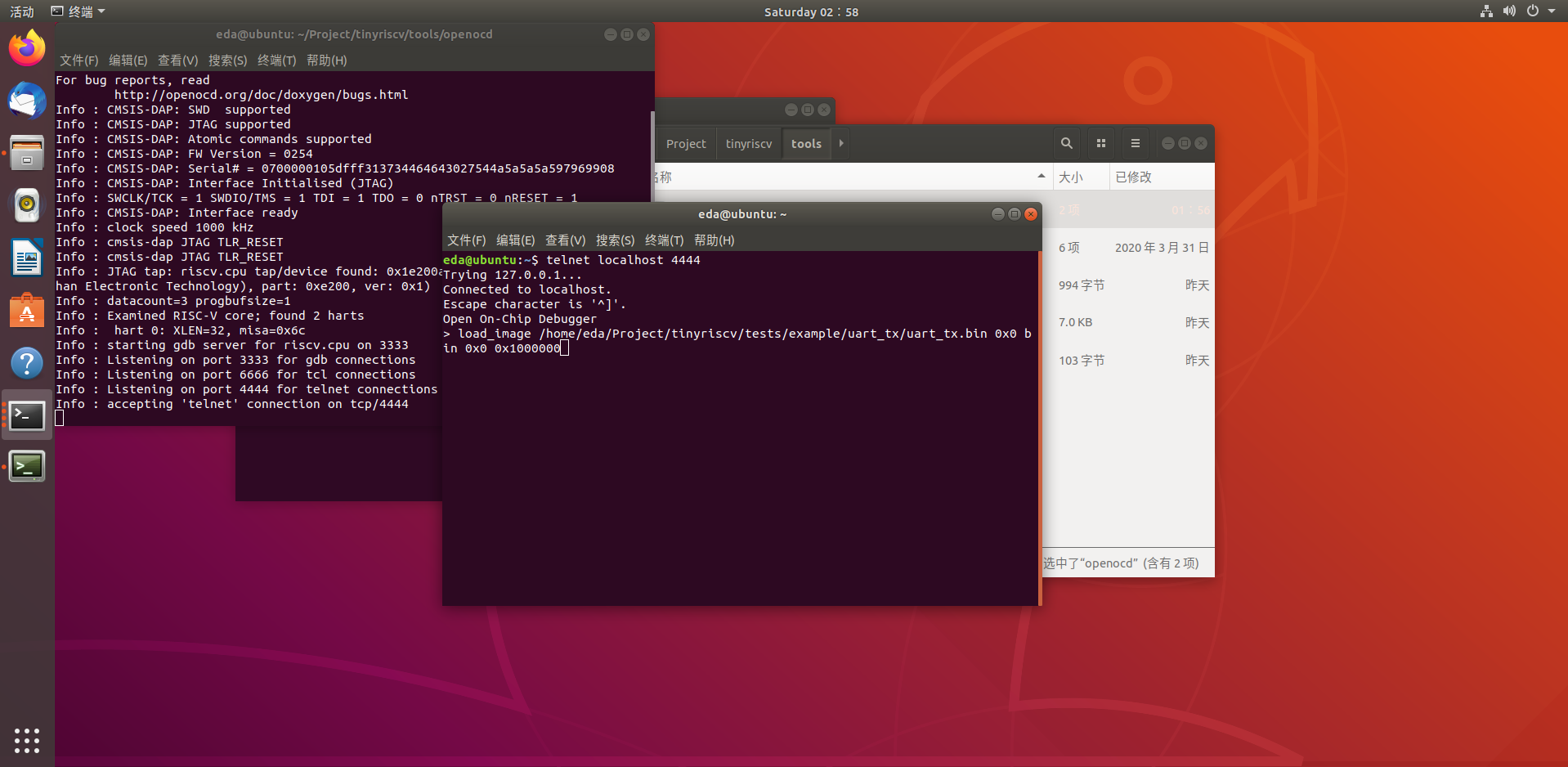
然后打开另一个CMD窗口,执行以下命令来连接openocd,注意电脑要启用telnet host服务。
telnet localhost 4444
然后在这个CMD窗口下使用load_image命令将固件下载到FPGA,这里以freertos.bin文件为例,如下所示:
load_image D:/gitee/open/tinyriscv/tests/example/FreeRTOS/Demo/tinyriscv_GCC/freertos.bin 0x0 bin 0x0 0x1000000
使用verify_image命令来校验是否下载成功,如下所示:
verify_image D:/gitee/open/tinyriscv/tests/example/FreeRTOS/Demo/tinyriscv_GCC/freertos.bin 0x0
如果下载出错的话会有提示的,没有提示则说明下载成功。
最后执行以下命令让程序跑起来:
resume 0
注意:每次下载程序前记得先执行halt命令停住CPU。;
这里使用gpio进行验证
在/home/eda/Project/tinyriscv/tests/example/gpio路径下使用make编译生成bin文件
在telnet窗口下使用下面命令烧写程序
load_image /home/eda/Project/tinyriscv/tests/example/gpio/gpio.bin 0x0 bin 0x0 0x1000000
verify_image /home/eda/Project/tinyriscv/tests/example/gpio/gpio.bin 0x0 bin 0x0
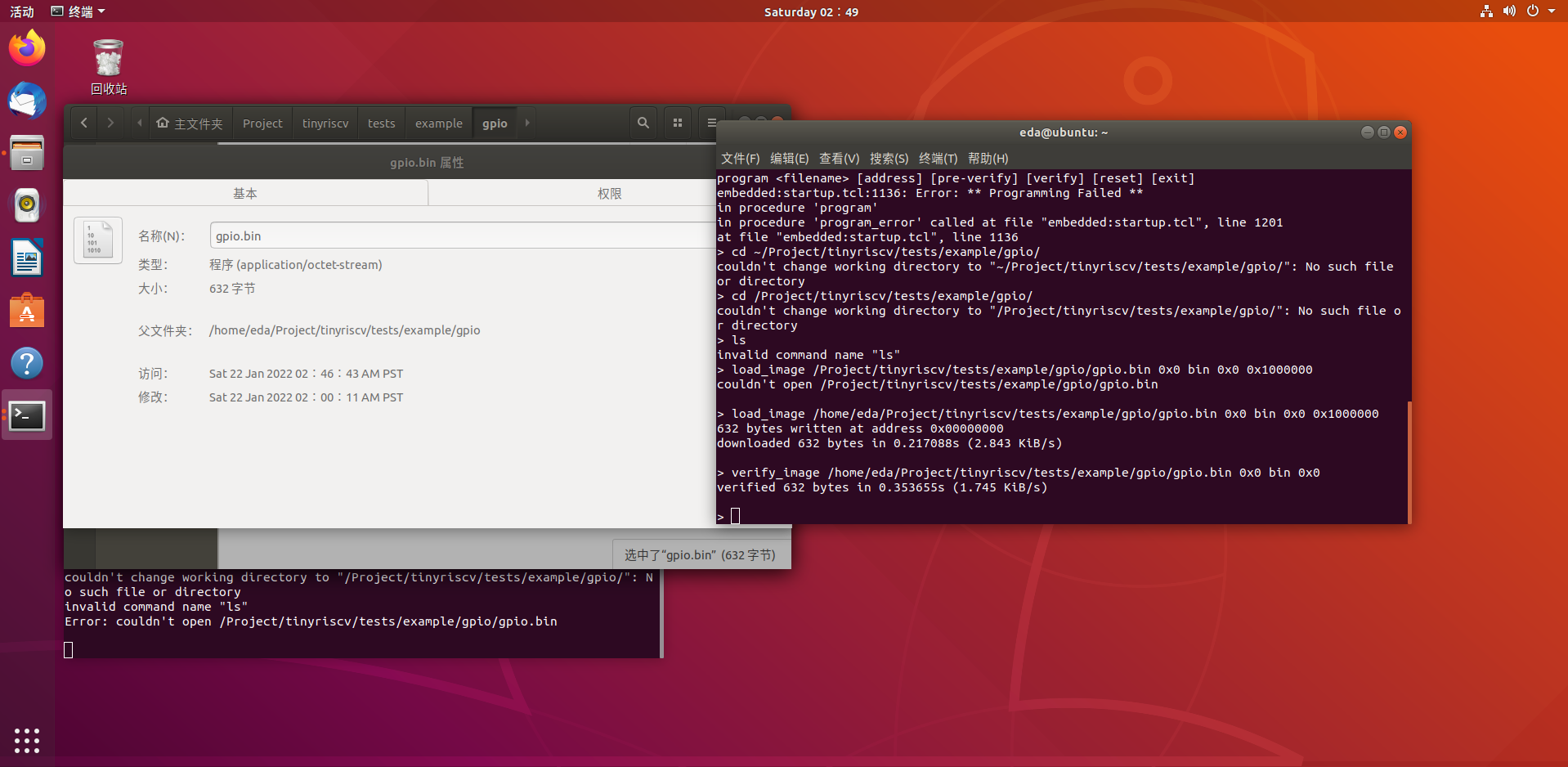
如果看到这个,说明程序烧写成功了
resume 0
此时开发板已经可以正常使用,LED灯会随对应的那个开关亮灭。
下面测试一下串口,
先去把串口发送uart_tx的程序编译一下
安装串口调试工具cutecom
sudo apt-get install cutecom
直接打开工具
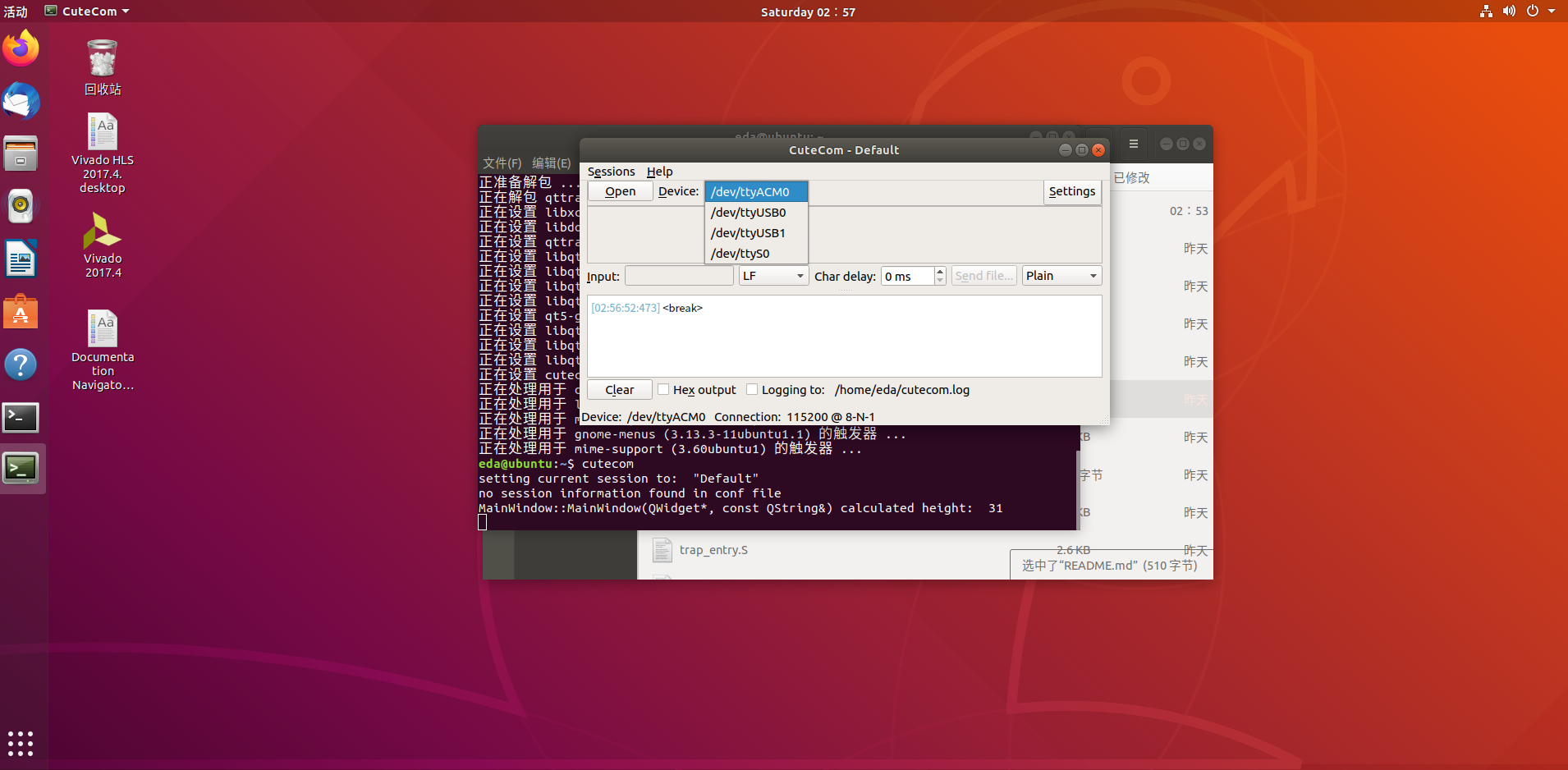
选这个ACM
OPEN以后会看到,连接的就是这个CMSIS-DAP调试器
load_image /home/eda/Project/tinyriscv/tests/example/uart_tx/uart_tx.bin 0x0 bin 0x0 0x1000000
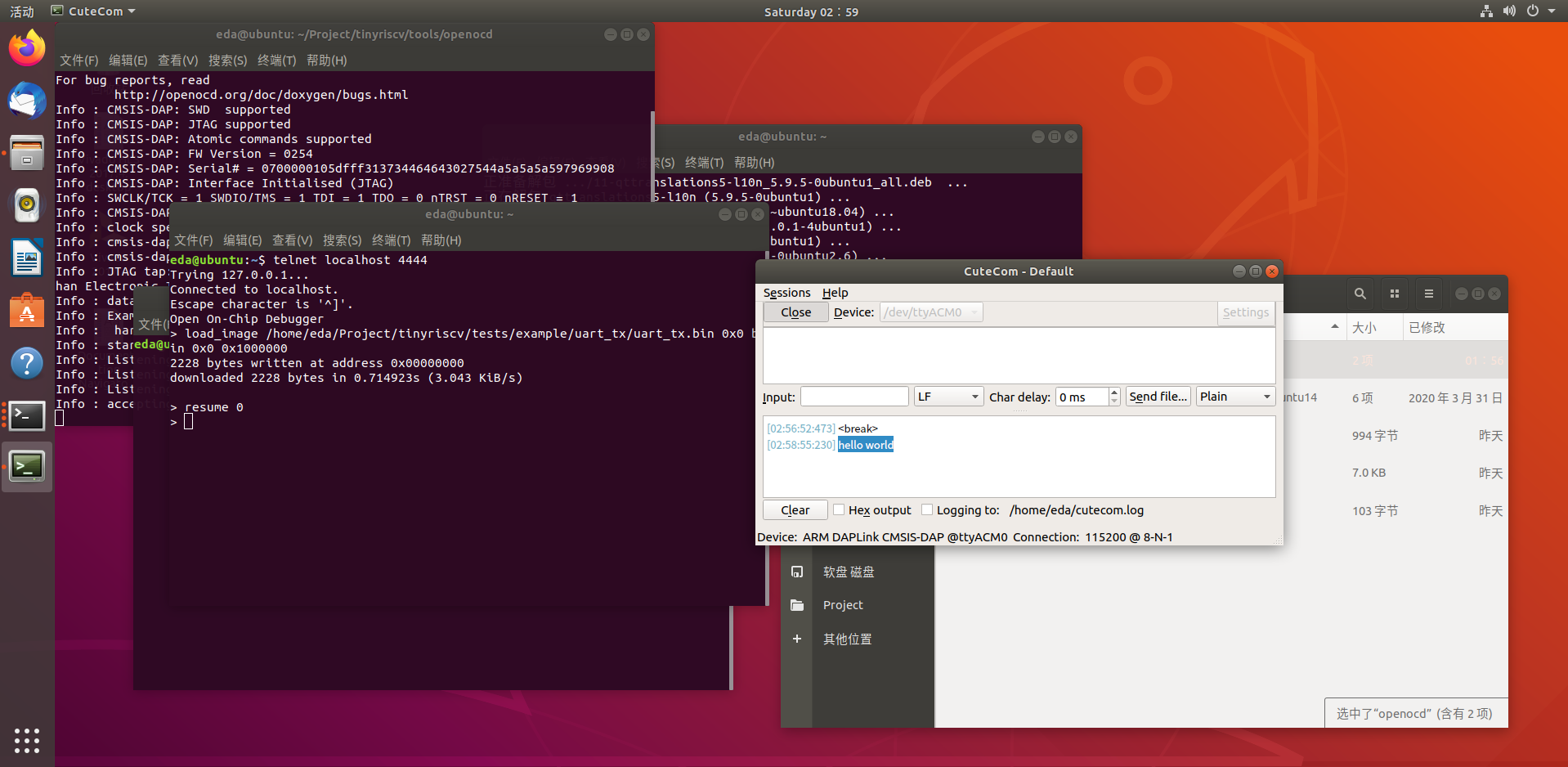
烧写进去并且resume以后,可以看到串口助手窗口打印了hello world。
至此,整个tinyriscv的linux开发环境搭建完成,可以运行整个项目的所有内容。
其他补充
输入su命令获取root权限时, 出现了
authentication failure 的问题,即身份验证失败。
需要进行下面操作:
$ sudo passwd root
Enter new UNIX password:
//此时输入你的密码
Retype new UNIX password:
//再次输入,相同密码。
passwd: password updated successfully
此时再用su命令,就可以获取到root权限了。